


Published on Nov 30, 2023
Paralysis is the inability whether temporary or permanent to move a part of the body. In almost all cases, paralysis is due to nerve damage, and it is not because of injury to the affected region. For instance, an injury in the middle or lower regions of the spinal cord is likely to disrupt function below the injury, including the ability to move the feet or feel sensations, even though the actual structures are as healthy as ever. Because of this in patients at least one of the following symptoms results. The brain is unable to relay a signal to an area of the body due to injuries to the brain. Brain-Computer Interface (BCI) also known as “direct neural interface” can provide a direct communication and interaction channel between the user’s brain and the computer. BCI helped to direct in assisting, augmenting, or repairing human cognitive or even sensory-motor functions.
BCI provides a new direction to construct an interactive system which can translate human Channel based on brain waves and muscles to allow users to communicate without movement with the external world. A BCI system is just to translate EEG signals from a reflection of brain activity into user action through system's hardware and software.
Improving the quality of life for the elderly and disabled people and giving them the proper care at the right time is one the most important roles that are to be performed by us being a responsible member of the society. It’s not easy for the disabled and elderly people to mobile a mechanical wheelchair, which many of them normally use for locomotion or movements. Hence there is a need for designing a wheelchair that is intelligent and provides easy mobility. In this thesis, an attempt has been made to propose a brain controlled wheelchair, which uses the captured signals from the brain and processes it to control the wheelchair. Electroencephalography (EEG) technique deploys an electrode cap that is placed on the user’s scalp for the acquisition of the EEG signals which are captured and translated into movement commands by the arduino microcontroller which in turn move the wheelchair. After measuring brain waves it delivers to brain to computer interface unit which analyzed and amplified and classify waves into alpha, beta, gamma, waves then arduino microcontroller controls the movement of wheelchair.
The electric-powered wheelchair is a wheelchair acting by an electric motor controlled with a handoperated joystick. However, some people suffering from severe motor disabilities cannot use the joystick, such as paralysis and physically disable people and locked-in syndrome. So they have other special devices available (touchpad, head /speech control, eye, EEG, etc). With the objective of responding to numerous mobility problems, various intelligent wheelchair related research have been created in the last years. In this research try not only to give mobility to handicapped people but, more importantly, independently of third party help. Despite these new types of control methods, can acquire users intention to control the wheelchair.
However, each type of alternative control has its limitations.Wheelchair users are among the most visible members of the disability community; they experience a very high level of activity and functional limitation and also have less of employment opportunities. Elderly people are the group with the highest rates of both manual and electric wheelchair use. Wheelchair users report difficulty in basic life activities, and perceived disability. It’s not easy for the physically challenged and elderly people to move a mechanical or electric wheelchair. In recent times there have been a wide range of technologies that help aid the disabled physically challenged. These control systems are designed to help the physically challenged specifically. These competitive systems are replacing the conventional manual assistance systems. The wheelchair too has developed significantly with a variety of guidance systems alongside like using the joystick and a touch screen, and systems based on voice recognition.
These systems however are of use to those with a certain amount of upper body mobility. Those suffering from a greater degree of paralysis may not be able to use these systems since they require accurate control. To help improve the lifestyle of the physically challenged further, this research work aims at developing a wheelchair system that moves in accordance with the signals obtained from the neurons in the brain through the electroencephalograph(EEG) electrode.EEG stands for electroencephalogram, a electrode commonly used to detect electrical activity in the brain. Detecting, recording, and interpreting “brain waves” began in the late 1800s with the discovery and exploration of electrical patterns in the brains and the technology has evolved to enable applications ranging from the medical detection of neurological disorders to playing games controlled entirely by the mind
Independent mobility is a necessity to live everyday life for human beings. A person with physical challenges has restricted mobility. For these people, Brain Computer Interface (BCI) provides a promising solution. The major design objectives of this project is given below
To reduce user effort in controlling the wheelchair
To ensure the safety during movement.
A smart wheelchair using inexpensive hardware and open source software.
To monitor the activity of the person in real time using webcam
The designed system should be portable for the user.
EEG is an electro-physiological monitoring method to record electrical activity of the brain. It is typically non-invasive, with the electrodes placed along the scalp. EEG measures voltage fluctuations resulting from ionic current within the neurons of the brain. The brain signals are classified based on their frequency EEG signal acquisition is done with the help of a specially designed non invasive bio sensor.
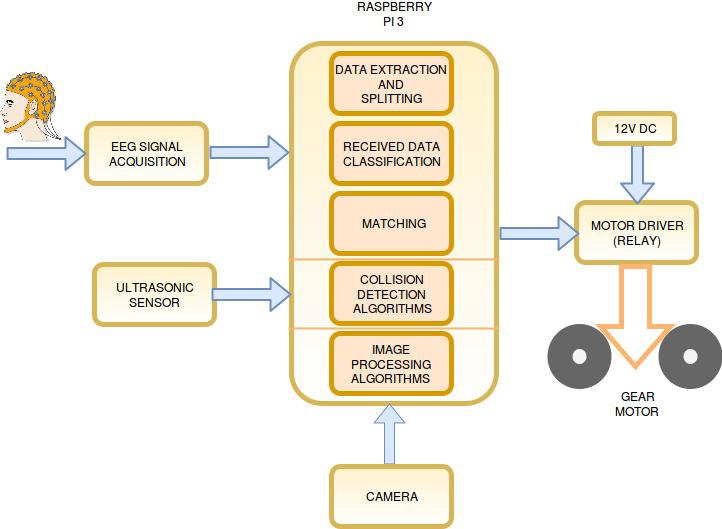
The acquisition part shown in figure 2 consists of Nuerosky mindwave, Arduino and Bluetooth HC-05 module. The mindwave device is used to capture the raw signal from the brain and transmit to HC-05 module over Bluetooth link. This Bluetooth device transfers these incoming raw EEG data into Arduino board at a baud rate of 57600. Inside the Arduino board the raw signal is classified into eye blink values and attention values. The eye blink value varies continuously as the eye blink strength varies. The separate eye blink strength and attention value is serially transmitted to the raspberry pi via USB at a baud rate of 57600. In the Raspberry pi processing part shown in figure 1, the eye blink and attention values are splitted and stored in separate memory locations.
After classification these signals are checked to meet the predefined conditions which is already defined in the instructions .Once conditions gets matched, the Raspberry pi 3 module gives commands to the motor driver. The motor driver unit is connected to 24 dc supply and 2 gear motors. Depending upon the commands given the motor driver, motor rotates in 3 different directions say left, right and forward. In order to ensure the safety during wheelchair movement, a camera is fixed at the front side of the wheelchair. The camera continuously captures video and transmits the video signal into the Raspberry pi module .Using advanced image processing techniques head movement and drowsiness of the person is detected. Ultrasonic sensors are given at the front, left, right and down of the wheelchair, which avoids the collision of the wheelchair with other objects.

An EEG signal with BCI is developed to control a wheelchair. The total design is based on all electric and to eliminate most of the mechanical parts. The conventional steering system that requires the user to control by hand is eliminated. Two gear motors are provided for each control the left and right wheels this is a 2-wheel drive control and works well with the BCI. The system is low cost, easy to control, and powered by Brushless DC motor and high performance battery system. The wheelchair movement is completely depends on attention values, starting and termination of left, right and forward direction is done with the help of eye blink values. The ultrasonic sensors and camera ensures the safety during the movement. This project satisfies all the design objectives that we are considered before the design implementation.
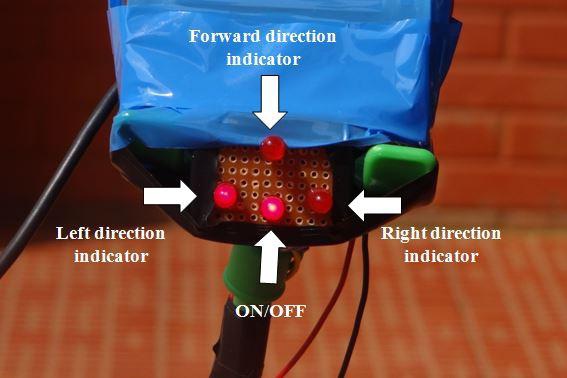
The figure 3 shows direction indication of the wheelchair using LEDs. There are 4 LEDs, which is used to indicate forward, right, left and ON/OFF conditions. When the forward direction LED glows, the person can identify the wheelchair is moving in forward direction. Similarly, right and left LED indicates the wheelchair is moving in right or left direction. There is also an LED located at the center, which shows whether the wheelchair is ON/OFF.

Figure 4 shows wheelchair movement in required direction based on eye blink and attention levels
The design and implementation of BCW have been summarized below:
1. In design instead of single channel, multiple channels can be used to more accurate decisions. Using analysis, disabled people could access any device placed in the environment decreasing their dependence on care-givers, nurses, and relatives etc. The present work is a preliminary study and it presents some limitations.
2. Further, in the future modification a display can be interfaced, mostly a monitor. The monitor which have a predefined slideshow or animation that illustrates the daily needs of a disabled person. The daily needs interface monitor will have different option sliding like water, hungry, medicine, sleep.
3. By using advanced processors, processing delay can be reduced. The system is easy to set up and can also be developed in a user friendly way. The user has to only select the destination and deal with unexpected situation that may occur. The system requires minimal input and concentration. Since the wheelchair repeats along the same part overtime, its motion is predictable, so the user can relax during the movement. The system is intended for people who can’t move at all and normally stuck in bed. Their notion of time differs from ours and being able to move independently within their environment represents a much improved quality of life.
4. Finally, the experiments should be conducted with the disabled people who really need a BCW because they might respond differently from the healthy users.
The literature survey on different hardware implementation methodologies reveal the advantages and disadvantages in previously designed systems. To meet the design objectives, a portable brain controlled wheelchair using Raspberry pi Arduino and Mindwave headset is designed.
The major aim of the project is as follows:
1. To control the electric wheelchair in different directions (forward, left and right) by using eye blink and attention level values from the EEG signals.
2. This project is user friendly design to meet real world target reaching tasks, where users may need to turn the wheelchair in left or right direction in steps and then moves to forward.
3. In the typical setting as moving forward, turning left/right, there is a good chance of examining all combinations of commands, such as non-control & control, move forward & stop, turn & move forward, just as in real wheelchair control.
[1] Imran ali mirza, Amiya Tripathy, Sejal chopra, Michelle D’sa, Kartik Rajgopalan, Alson D’sauja,Nikhil Sharma, “Mind-Controlled Wheelchair using EEG Headset and “Arduino Microcontroller”, IEEE,2015.
[2] Pravin m Shinde, Vaishali S Jabade. “Literaturer Brain computer interface using Electroencephalogram signal” Imran Ali Mirza, Amiya Tripathy, Sejal Chopra, Michelle D’Sa, Kartik Rajagopalan, Alson D’Souza, Nikhil Sharma. Mind-Controlled Wheelchair using EEG Headset and “Arduino Microcontroller, IEEE,2015.
[3] Pinos Eduardo, Guevara Daniel, Fátima López, Electroencephelographic Signals Acquisition for the Movement of a Wheelchair prototype in a BCI System, IEEE,2015.
[4] Brice Rebsamen, Cuntai Guan, Senior Member Haihong Zhang, Chuanchu Wang Cheeleong Teo, Marcelo H. Ang, Jr. Etienne Burdet, .A Brain Controlled Wheel chair to Navigate in Familiar Environments, IEEE, 2010.
[5] Brice Rebsamen, Etienne Burdet, Cuntai Guan, Haihong Zhang, Chee Leong Teo, Qiang Zeng, Marcelo Ang and Christian Laugier. A Brain Controlled Wheel chair Based on P300 and Path Guidance, IEEE 2006.
