


Published on Nov 30, 2023
At present, driver’s vision is obstructed in extreme weather conditions like, heavy rainfall, foggy conditions, snow fall and night travel along hilly terrain. During such situations the head lamp and the fog lamps are only of little use. Yet the drivers are forced to maneuver the situation with certain consciousness and leave the results for benefit of doubt. This also limits the speed. According to the Federal Highway Administration (FHA), from 2002-2012, roughly 1.3 million weather-related vehicle crashes occurred each year in the U.S. on average. Weather or slick pavement accounted for 23 percent of all vehicle crashes. When breaking out fog-related accidents, there are 31,385 crashes, 511 deaths and 11,812 injured. That is over 500 road fatalities in fog-related car crashes each year!
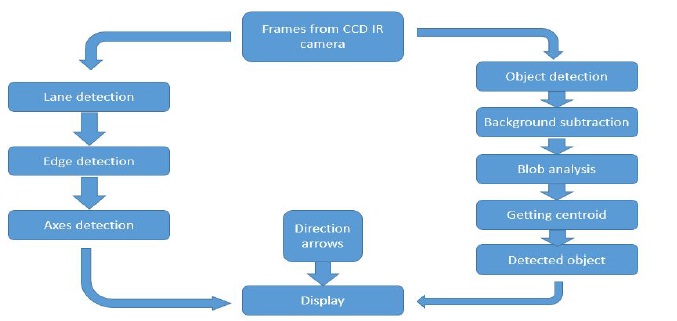
In Advanced Driver Assistance Systems in order to achieve the desired safety on roads, the complex and challenging tasks of future road vehicles are road lanes detection or boundaries detection (white and black lines on roads) and Obstacles detection (cars, pedestrians, trees, etc) especially for moving object detection is a key component of collision avoidance in driving assistance systems.
It has been observed that the vast majority of ac-cidents are caused by human error or misjudge-ment, and that more than two thirds of fatalpedestrian accidents happen during the hours ofdarkness. There is growing interest in the de-velopment of machine vision systems to automatethe detection of pedestrians and other VRUs innight vision systems. By automating the processthe driver’s attention is not distracted from theroad to focus on a display. Some techniques canbe adapted from the area of people tracking in se-curity and surveillance. However due to the move-ment of the camera, background subtraction, acommon starting point in such systems, cannot beused. Some methods can be transferred from thearea of VRU detection with a visible light camera.However, due to fundamental differences betweenvisual and thermal imagery, many of the conven-tional techniques are not directly applicable (PDF) A review of automotive infrared pedestrian detection techniques.
Thermal radiation from humans and animals peaksin the 8-14m far-infrared (FIR) spectral band,which is why this technology is ideal for identifyingVRUs in situations where the driver may have dif-ficulty doing so. Thermal imaging has only becomeviable in the automotive environment in recentyears, thanks to significant advances in the semi-conductor technology behind it. Microbolometersensors are currently the most common night vi-sion sensors for automobiles, due to decreasingcost, high frame rate, image and thermal resolu-tions. The frame rate allows for a real-time de-tection system to be implemented effectively, andits low power consumption coupled with a compactdesign make it suitable for automotive application (PDF) A review of automotive infrared pedestrian detection techniques.
As far as IR illuminator is concerned it is almost invisible to our eyes although it is illuminating. So it will not affect to the eye sight of the person who is coming from counterpart. And the efficiency of getting information about the objects is far better than present techniques especially during night times. So it mainly solves mainly two problems, one is being an efficient system for extreme weather conditions including foggy, rainy, night conditions. And another is illuminating issues to vehicles coming from counter directions.
1. Raspberry Pi
2. Wireless radio
3. Antenna
4. GPIO
5. USB Chip
6. IR Illuminator
7. IR Camera
1. OpenCV
2. Python
3. Linux Operating System
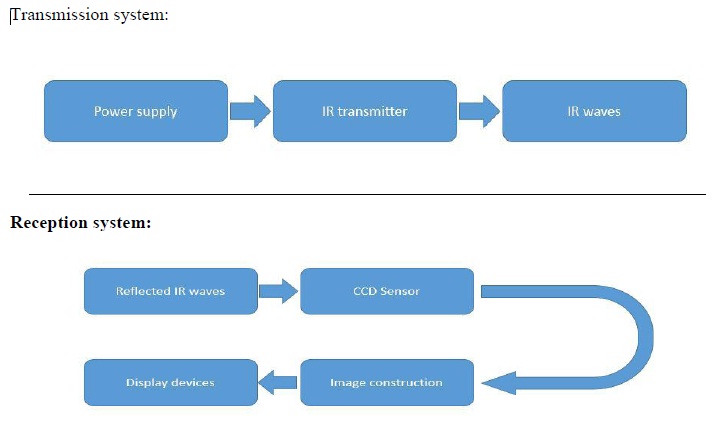
Overview of system:
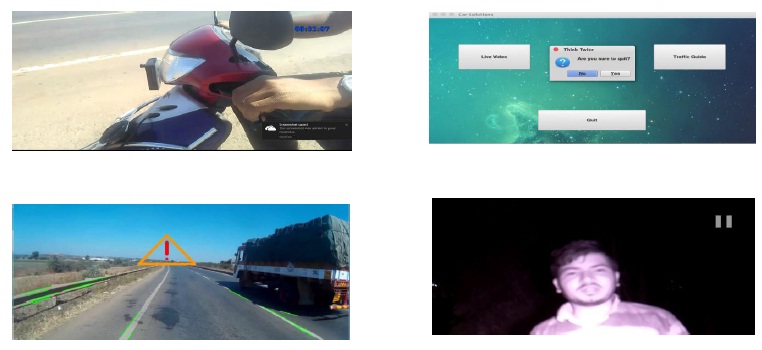
The results only show, how efficient our IR system is when compared to other normal systems such as fog lamps. Particularly during nights where we don’t get street lights the amount of information that we are getting about the front view is really appreciable.
We tested it in highways and traffic hit roads and came to know that because of usage of Infrared illuminators which is almost invisible to human eye sight and spreading of light is also negligible. This is going to be one of the best solutions to avoid accidents when vehicles when their coming from opposite direction.
Because of the time constraint we applied LBP which was faster on dataset, but HOG or HAAR becomes more efficient. Also dataset can be increased from 3800 images to more. Processing power needs to be improved, because the arm processor is quite insufficient to large dataset and increased number of stages. The illuminator efficiency can be increased. The node Bluetooth server running on sensor node can be made efficient and a point to point connection should be used instead of broadcast that we are using now. Implementation of IR camera and IR illuminator in vehicle is necessary. The efficiency of lane detection can be improved my making the algorithm more efficient in all possible ways. As far as android application part is concerned customization can be done by adding some more features.
We provided some ADAS (Advance Driver Assistance System) features such as Lane detection and objects detection using image processing. Object detection gives information about the all nearby vehicles and also warns to the driver about such events using voice alerts. So that depending on that driver can take the actions immediately. And commands about directions (take left, take right) also warns to the user about directions.
The GUI or more specifically the android app that we have created provides best way to interact with the electronic system that it is embedded with. Through which we can control and view features like live common video, infrared video footage etc.
So basically our system providing a better and a more efficient answer to the old system where it’s Cumbersome to get proper front view of road. Since it practically tested and the features like lane and object detection also included we can implement this in all types of cars unlike the present trend which is only concentrating on high end or flagship cars for such features. Since it is not a so expensive product and implementation is also not a big issue these can be a good future product in the automobile industry.
[1] P. Salmon, M. Regan, and I. John-ston. Human error and road transport.Monash University, 2005. Available 31stMarch 2008: http://www.monash.edu.au/muarc/reports/muarc257.pdf. (PDF) A review of automotive infrared pedestrian detection techniques. Available from: https://www.researchgate.net/publication/224384040_A_review_of_automotive_infrared_pedestrian_detection_techniques [accessed Dec 06 2018].
[2] Pedestrian Safety. Irish Road Safety Au-thority, 2005. Available 31st March 2008:http://www.rsa.ie/publication/publication/upload/pedestrian safety.doc.
[3] Y. Fang, K. Yamada, Y. Ninomiya, B. Horn,and I. Masaki. Comparison betweeninfrared-image-based and visible-image-basedapproaches for pedestrian detection. In Pro-ceedings IEEE Intelligent Vehicles Sympo-sium, pages 505–510, 2003. (PDF) A review of automotive infrared pedestrian detection techniques. Available from: https://www.researchgate.net/publication/224384040_A_review_of_automotive_infrared_pedestrian_detection_techniques [accessed Dec 06 2018].
