


Published on Nov 30, 2023
Rubber tapping is the process of extraction of latex from rubber trees. Rubber tree tapping is considered to be a skill oriented job. During the tapping process, the taper has to make a downward half spiral incision on the tree bark to extract the white milky liquid called latex. On a typical day, a rubber tapper has to tap about 500 to 800 rubber trees manually with a tapping tool within a specified time of the day. Availability of skilled laborers who could accomplish this mammoth task is getting scarce as days pass by. Even though cheap unskilled labor is available, without appropriate time and training they would end up damaging the tree. The automated rubber tapering machine designed here would replace the manual labor required for the tapping process. Also with a clock feature to control the timing of the tapping process, higher yield of rubber latex could be obtained.
Natural rubber is an elastomer that was originally derived from latex, a milky colloid produced from some plants. The plants would be „tapped‟, that is, an incision is made into the bark of the tree. A sticky, milk colored latex sap is collected. This is refined into usable rubber. The purified form of natural rubber is chemical polyisoprene, which can also be produced synthetically. Natural rubber is used extensively in many applications and products, as is synthetic rubber. It is normally very stretchy and flexible and extremely waterproof. It is used for making innumerable articles ranging from footwear, sports goods, cushions, insulating material for cables, and pencil erasers to tiers and tubes. Thus, indirectly, rubber helps in promoting the system of modern transport and communication. The rubber tree grows in tropical climates and is cultivated in many countries. Asia has continued to dominate the world supply of natural rubber, averaging more than 90% of total world production. Thailand, Indonesia, and Malaysia are the top three Rubber producing countries in the world. Other countries producing rubber are Vietnam, Liberia, India, USA, China, Japan etc. India is one among the top ten rubber producing countries.
Over half of the rubber used today is synthetic, but several million tons of natural rubber are still produced annually, and is still essential for some industries, including automotive and military. In addition to this, natural rubber now finds extensive use in soil stabilization, in vibration absorption and in road making. A variety of natural rubber based engineering products are developed for use in these fields. Favorable temperature for growing rubber trees should be around 27°C and should never fall below 22°C.
The main crop from rubber plantation is latex, which is harvested by the tapping process. Two to three hours after tapping, the latex collected in the cup is transferred to a clean bucket. About 70-80 percent of the crop from a rubber plantation is in the form of latex. The latex which gets solidified in the tapping panel and the collection cups also form part of the crop and are collected by the tapper in a basket just prior to tapping. The latex split and/or overflowed to the ground (earth scrap) when gets dried up is also collected as scrap once in a month. These are collectively called coagulum. Comparing to other crops rubber does not require much water. It can be grown where there is a scarcity of water and it is a well-suited plantation crop for hilly region. There is a demand for rubber products all the time, thus there will be a steady market price for the rubber latex.
Rubber tapping is the process of extraction of latex from rubber trees. Each night the rubber tapper must remove a thin layer of bark along a downward half spiral on the tree trunk. If done carefully and with skill, this tapping panel will yield latex for up to five years. Later the opposite side will be tapped, allowing this side to heal over.
The spiral allows the latex to run down to a collecting cup. The work is done at night or in the early morning before the day‟s temperature raises, so the latex will drip longer before coagulating and sealing the cut. Depending on the final product, additional chemicals can be added to the latex cup to preserve the latex longer. The tapping operation is still carried out manually and requires skilled labour.
The rubber planters are facing a serious shortage of tappers. In the coming future, the world is going to face a great shortage in availability in skilled labours. Taking these problems into consideration engineers all around the world are trying to develop alternative ways for the tapping process. But till date no good design has been brought up, tapping sector is still on the same traditional path. After studying the various scenarios for rubber tapping and referring about the various situations of tapping and other required data, we have come up with a design for rubber tapping machine. This can help even the unskilled ones to carry out tapping operation and expected to make a revolutionary change in the field of tapping.
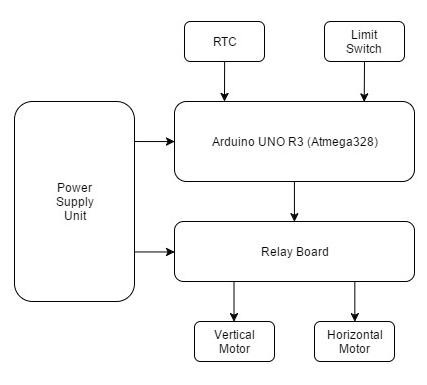
A mechanical model is prepared such a way that it performs the process automatically. There are mainly two support structures, vertical rods and circular rods with geared teeth, which are used to hold the entire device setup on the rubber tree. Those are fixed to the tree using the belt. Two dc motors are used to provide two dimensional movements for the tapping blade. The position of the tapping blade is precisely controlled by the dc motors driven by the microcontroller.
The power supply used here is 12V DC. The relay board is used here to drive the 2 DC motors. Four relays are used in a bridge configuration to control the speed and the direction of the 2 DC motors. The relay is controlled with 5V signal and needs a supply of 12V. Two DC motors are used for vertical and horizontal movement of the tapering blade. The horizontal movement is controlled by a geared DC motor which has a 60rpm drive and a base motor drive of 6000rpm. The vertical motor has a 200rpm drive and a base motor drive of 10000rpm.
A real-time clock module is used for time keeping. Also, to set the desired time to initiate the working of the tapper. Arduino Uno R3 is a microcontroller board based on ATmega328. It has 14 digital input/output pins, 6 analog inputs, a 16Mhz ceramic resonator, a USB connection, a power jack, and a reset button. It contains everything needed to support the microcontroller. The Arduino is programmed for the movement of the vertical and horizontal motors, which in turn controls the movement of the tapering blade. The limit switch marks the starting and the ending point for the blade movement.
Arduino UNO R3(Atmega328), Relay Board, DC Geared Motors, RTC, Limit Switches, Tapering Blade, Power Supply.
Arduino IDE for programming the Arduino, Creo Pro 3D CAD software for the mechanical frame design.
Arduino Uno R3 is a microcontroller board based on ATmega328. It has 14 digital input/output pins, 6 analog inputs, a 16Mhz ceramic resonator, a USB connection, a power jack, and a reset button. It contains everything needed to support the microcontroller. The Arduino is programmed for the movement of the vertical and horizontal motors, which in turn controls the movement of the tapering blade.
The relay board is used here to drive the 2 DC motors. Four relays are used in a bridge configuration to control the speed and the direction of the 2 DC motors. The relay is controlled with 5V signal and needs a supply of 12V.
The vertical motor has a 200rpm drive and a base motor drive of 10000rpm.This is used for the vertical motion of the blade.
The horizontal movement is controlled by a geared DC motor which has a 60rpm drive and a base motor drive of 6000rpm. This is used for the horizontal motion of the blade.
A real-time clock module is used for time keeping. Also, to set the desired time to initiate the working of the tapper.
The limit switch marks the starting and the ending point for the blade movement.
The power supply used here is 12V DC. It is used for the proper functioning of Arduino UNO R3 (Atmega328) and Relay Board.
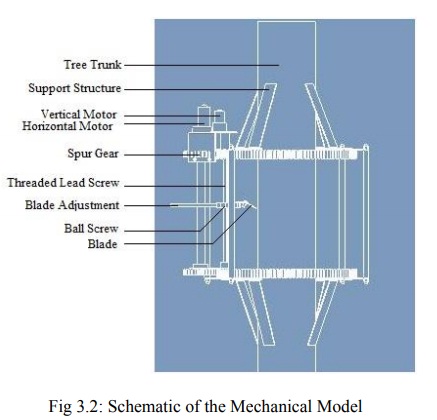
The schematic model consists of
Motor setup for Vertical and horizontal movement motors.
Spur gears
Threaded Lead Screw
Ball screw
Tapping blade
Blade adjustment rod
Supporting rods
The entire set up of the automated rubber tapering machine is mounted on the rubber tree with the help of supporting rods and is fastened by a belt. There are 2 spur gears used with a larger diameter that encloses the tree. This acts as a path for the horizontal movement of the motor blade. The vertical movement uses a threaded lead screw with guide ways which is used for the vertical movement of the blade. There is also a blade adjustment rod that is used to adjust the point of contact of the blade with the tree trunk
Circuit Diagram
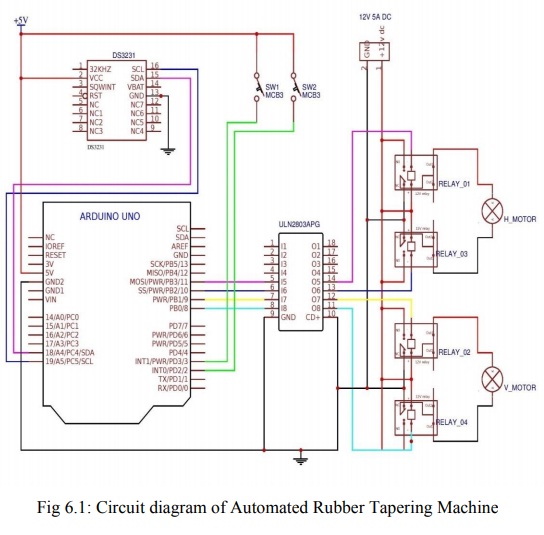
The main goal of the Automated Rubber Tapering machine is to make an incision on the rubber tree every alternate day. For this purpose, we have used a Real-Time Clock. Using which when an alarm is set the tapering process is started automatically. The connections are shown in the figure 6.1. The Arduino Uno R3 is the microcontroller used in this device. It is the heart of the device. The Arduino is interfaced with the RTC, the Relays and the 2 geared DC motors using the relay driver IC. It is programmed using the Arduino IDE. The functions specified by the programs include generation PWM signals for the motor speed control and also to match the analog time signals from the RTC to switch on the device at the set time. The SCL and SDA Pins of the RTC are connected to the Analog Pins A5 & A4 of the Arduino. The RTC maintains the Time.
It has a backup battery, where in if it loses external power it could still maintain the clock accurately. We can set an alarm by programming the Arduino. Say if we need to set an alarm at 4 A.M. for the automatic rubber tapering machine to make an incision on the tree trunk, the same is programmed into the Arduino. The Arduino Compares the time at which the alarm is set with that of the time maintained from the RTC. When both the time is matched then the device is turned on. There are 2 Limit Switches used, which helps to determine the end points for the motor movements. Also helps to switch states of the motors. Initially the blade is in its default positions i.e. the top left corner of the tapering area. The Arduino is connected to the relays using the relay driver ULN2803. The relay driver is used to control the relay. The relay driver gets its control signal from the Arduino which is of 5V.
The digital pins from the Arduino i.e. D8,D9,D10,D11 is connected to the input pins I5, I6,I7 and I8. The output pins from the Relay Driver i.e. O5, O6,O7,O8 are connected to the relays 1,3,2,4 respectively. A relay is an electromechanical switch which controls the power supply to the motor. The relays R1 and R3 are connected to H-motor which is responsible for the horizontal movement of the tapering blade. The relays R2 & R4 are connected to V-motor which is responsible for the vertical movement of the blade. The combined movement of the 2 motors gives a downward half spiral movement of the blade along the tree trunk. The relays are in H bridge configuration through which the direction is controlled. The speed of the DC motors is controlled using PWM techniques.
The Flow of the program is explained with the following steps.
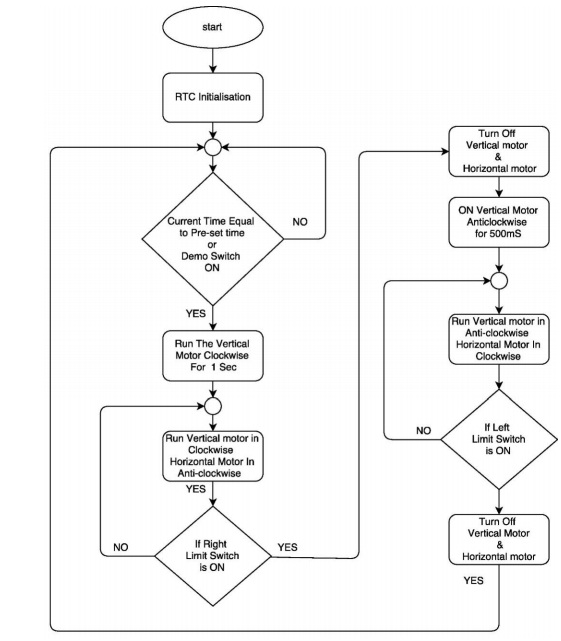
1. The RTC is initialization is done. The RTC sends the Arduino the time information as an analog signal.
2. Comparison is made between the actual time and the pre-set time.
3. If the two times don’t match then repeat the previous step.
4. If the two times matches then run the vertical motor clockwise for 1 second.
5. Run both motors i.e. vertical movement motor in clockwise direction and horizontal movement motor in anti-clockwise direction.
6. Check if the right limit switch is ON.
7. If it is in OFF state continue with the Step 5.
8. If the right limit switch is ON, then turn both the motors OFF.
9. Turn ON the Vertical movement motor for 500ms.
10. Run both motors i.e. vertical movement motor in anti-clockwise direction and horizontal movement motor in clockwise direction.
11. Check if the left limit switch is ON.
12. If it is in OFF state continue with the Step 10.
13. If it is ON then the control will flow to Step 2
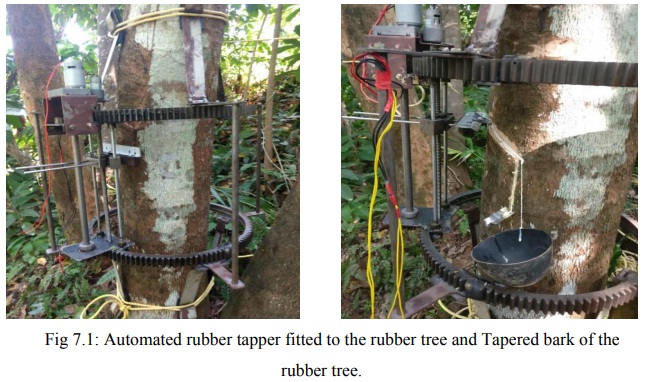
The Automated Rubber Tapering Machine is fixed to the rubber tree and the device operation is performed. The results were up to the expectations. A highly skilled labour needs about 40 seconds to tap a tree, whereas the machine could do it in 20-30 seconds. By installing the machine on every single rubber tree in the farm, the entire tapping process could be done within minutes. A manual labour takes hours to complete the same job. The flow of latex is maximum during early mornings i.e. from 3A.M. to 6A.M. Tapping using the automated rubber tapering machine yields maximum latex as the machine could be turned on as early in the morning as desired using the RTC. Figure 7.1 below shows the prototype model of automated rubber tapering machine fitted to a rubber tree and the tapered bark of the rubber tree.
This module will greatly help for the further innovation and research to overcome the labor problem in rubber plantations. Further work on the prototype will surely make it flexible, economical and hence it will help the rubber planters. The weight and cost of mechanical model can be reduced by replacing iron rods with aluminium or plastic.
At present the Agricultural sector is facing a shortage of manual labour than any other sectors in the world. As agriculturists form the backbone of our nation, it is of utmost importance that proper tools be supplied to them to overcome any obstacles that they face. The only solution for this is the application of economically balanced technology in those areas. The “Automated Rubber Tapering Machine” designed here is one such application of technology in the field of rubber tapping where it requires highly skilled rubber tapper. It simplifies and automates the whole process of rubber tapping. The device is more reliable than manual workers. The amount of latex collected during the tapping process done using the device will be more than the tapping done conventionally. The prototype developed here would be a milestone for further research and development in the field of rubber tapping. The next iteration of the device would be designed to make it light weight, economically feasible for implementation on large scale in rubber farms & to make it endure the environmental conditions of the farm to last long
[1] D.Y. Giroh and E.F. Adebayo, “Analysis of the Technical Ineffiency of Rubber Tapping in Rubber Institute of Nigeria, Benin City, Nigeria”, Journal of Human Ecology, 27(3): 171-174 (2009).
[2] Susan John Soumya, Rajendran S. Vishnu, R Nair Arjun, Rao R Bhavani, “Design and testing of a semi automatic rubber tree tapping machine (SART)”, 2016 IEEE Region 10 Humanitarian Technology Conference (R10-HTC), 10.1109/R10- HTC.2016.7906779, 21-23 Dec. 2016.
[3] Jithin Kumar A, Manoj Kumar M N, Prajwal Rai A, Sandeep K, “Automated Rubber Tapper”, Project Dissertation in Department Of Electronics and Communication Engineering, KVGCE Sullia, May 2010.
[4] Santhosh Simon, “Autonomous Navigation in Rubber Plantations”, Second International Conference on Machine Learning and Computing 2010, Bangalore, India, 9-11 Feb. 2010 IEEE, 10.1109/ICMLC.2010.53
