


Published on Apr 02, 2024
This paper presents a hydraulic hybrid vehicle drive train to improve the fuel efficiency of a passenger car. The hydro-mechanical system demonstrates excellent fuel economy potential, yet requires development work in the area of pump/motors with high efficiency at low displacement fractions. The fuel consumption of off-road machines is strongly reduced if part load operation of the engine and throttled control of the hydraulic implements are avoided. This is the aim of the ‗Hydrid‘: a full hybrid hydrostatic drive train and control system.
The Hydrid has hydraulic accumulators for energy storage and power management, hydraulic transformers for efficient power control, and highly efficient and compact in-wheel motors.
System behavior demonstrates that the new control strategy takes advantage of high power density and efficiency characteristics of hydraulic components, and minimizes disadvantages of low energy density, to achieve enhanced overall efficiency.EPA is leading the development of hydraulic hybrid vehicles. This breakthrough technology can cost-effectively reduce emissions and drastically reduce fuel consumption while maintaining or improving performance. A delivery vehicle is an excellent application for hybrid technology since its service cycles involve numerous braking events. Hydraulic hybrid technology has significant commercial potential for a wide range of medium-sized vehicles such as urban delivery trucks, shuttle/transit buses, and waste disposal vehicles.
energy storage. The energy storage is used during braking events and other drive train control strategies to minimize fuel consumption. Two auxiliary power sources have been found most practical: electric motor/generators combined with batteries and hydraulic pump/motors combined with hydraulic accumulators.Electric hybrid vehicles have been the first hybrid technology to be mass produced for the commercial passenger car market. A strength of electric hybrids is the high energy density of electric batteries, allowing for large energy storage in relatively compact and lightweight batteries. A substantial shortcoming of electric hybrids is the relatively low power density of both electric motor/generators and batteries at approximately 30-100 W/kg. Switching the second hybrid power source to hydraulics realizes benefits in a multiple areas:
1) The power density of hydraulic pumps/motors and accumulators is very high at approximately 500-1000 W/kg.
2) Hydraulic components are inexpensive when compared with electrical components, especially advanced battery packs.
3) Certain hybrid architectures allow for independent control of the torque at each wheel, which opens numerous possibilities for vehicle dynamics control.
4) Recent and developing technologies such as digital hydraulic valves and high energy density accumulators are improving the future outlook of hydraulic hybrid vehicles.
A prime advantage of certain hydraulic hybrid drive train architectures is leveraging the intrinsically high power density of the hydraulic energy storage system through optimal engine management. Internal combustion engines create power most efficiently at relatively high power levels near the RPM of the peak torque output. Operating at other conditions decreases the energy conversion efficiency. An optimal engine management scheme runs the engine near the peak efficiency, with a portion of the power being transferred to the wheels while the additional power is stored. Once the accumulator is charged to a desired state, the engine is shut off and power for vehicle propulsion is supplied by the accumulator.
There was a tremendous amount of work that went into the controls design. The majority of the time and effort went into understanding, to a very detailed level, what was being controlled and why it needed to be controlled. In the figure below, there is a schematic of the hydraulic system which illustrates where there are valves, release valves, accumulators, and displacement controllers.
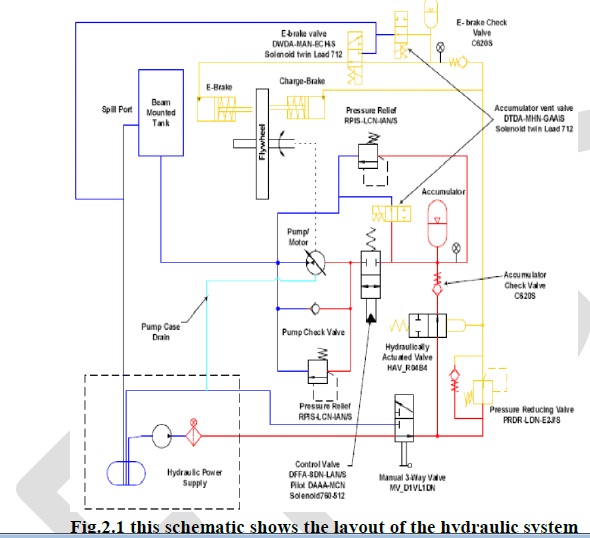
The Hydraulic Hybrid system is broken down into two main parts: the Safety Controller and the Displacement Controller. The safety controller is very similar to the displacement controller because they both monitor the system for dangerously high speeds and pressures. When there is a speed or pressure that is read in that exceeds set levels within the controller, the displacement controller is the fires to react and attempt to adjust the displacement until the system reaches stability. Similar if the pressure is increasing too rapidly or is reaching critical levels, the displacement controller will set the displacement pump to no longer pump hydraulic fluid into the accumulator. Should the displacement pump not gain control of the system, or fail completely, the safety controller, which is a completely separate unit will assume control of the system and turn off the hydraulic system. It will also release any pressure from the accumulator, and in our test case, it does apply the brakes to reduce any dangerous speeds.
1. PARALLEL SYTEM
2. SERIES SYSTEM
3. HYDROMECHANICAL DRIVE TRAIN.
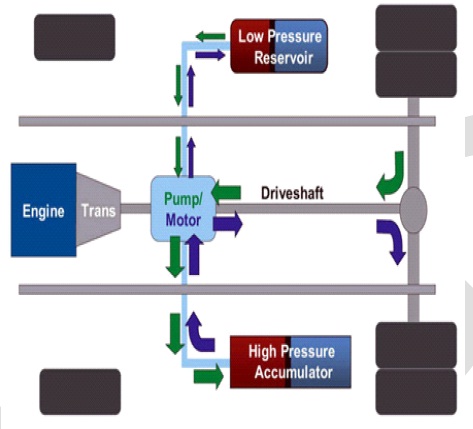
The hydro-mechanical system discussed in this paper, and shown in Figure, consists of a hydraulic pump/motor mount between the engine and a mechanical transmission. The output of the transmission and a second hydraulic pump/motor are combined in a planetary differential. The output of the differential powers the wheels. The two variable displacement pump/motors are connected to a high pressure accumulator for energy storage. The goal during operation is to transmit as much power as possible through the highly efficient mechanical transmission, while using the hydraulics to allow the engine speed and vehicle velocity to be independent.
An innovation of the hydro-mechanical drive train developed by the authors is a method to control the torque at each wheel independently. Independent control of the torque at each of the wheels opens avenues to an array of vehicle dynamic controls. In conventional drive trains, active vehicle dynamic controls, such as traction control, are accomplished by applying brakes to individual wheels. This method is inefficient and imprecise. As a solution to this issue, the authors developed a drive train that allows direct control of the torque at each wheel through varying the displacement of hydraulic pump/motors.
The hydro-mechanical drive train with independent wheel torque control is functionally similar to the standard hydro-mechanical drive train presented in Figure 1, yet the power split is recombined in planetary differentials for each wheel. Figure 2 shows the concept for independently controlling the torque at both rear wheels. The output of the mechanical transmission enters a right-angle gear set which contains two directly coupled outputs. These outputs enter planetary differentials which combine the mechanical branch with one of two hydraulic branches. While Figure 2 is a representation of a two-wheel-drive implementation for clarity, this drive train can also be implemented for all wheel- drive by adding the front drive shaft, right-angle gear set, and differentials with pump/motors for each front wheel.
Idle losses of the engine are avoided
Losses of the hydrodynamic torque converter are avoided
The engine is always operated around the sweet point
Throttle losses in the control of hydraulic cylinders are minimized
Energy recuperation can be maximized
Auxiliaries like steering systems and cooling fans can be decoupled from the engine and optimized from an efficiency point of view.
40% or more reduction in carbon dioxide, the primary greenhouse gas It will depend on the kind of application how much all of these factors will contribute to an improvement of the fuel economy.
Eriksson has calculated that a load sensing control of a double acting hydraulic cylinder has an efficiency of around 37%. By means of a hydraulic transformer, most of these losses could be avoided. As for the drive train, the total efficiency of a pump, a transformer and the hydraulic in-wheel motors will not be higher than the current mechanical drive train, but it will certainly improve the average cycle efficiency of the engine. The effects on the fuel consumption will be similar to the full hydrostatic drive train, which is developed for a truck application.
This project will never truly be finished. There are always opportunities to make it better, make it more efficient, and make it cheaper. This semester most of the research and brute force work was done in order to get actual test results and data that can be used to further develop the design. The bulk of this semester was spent learning the concept of the hydraulic hybrid and how to control it. It was a huge undertaking to get a test skid and a vehicle up and running on one semester however those goals will be complete by the end of the semester. There is a bright future for this project. As stated before, the goal of this semester was just to get everything running. Now begins the challenge of collecting data and designing a system that will perform most efficiently. One area that will see the largest improvement over the next year is the automation of the control system.
Currently the controls are all set by a user at a computer. In the next semester, the main goal is to have all settings automatically set by the controller, and the only input from the driver will be pressing the gas pedal. Having this system completely automated will allow for a more accurate picture of how the vehicle is operating. After we collect a lot of data, we will be able to determine what displacements will allow for improved operation, better fuel efficiency, and reduced emissions. As fuel prices increase as well as pollution, this project has the ability to provide solutions to both of those issues. Working on this project was as educational about project management as it was engineering. There was so much to be learned about managing so many people on such a large scale project.
When mistakes were made, deadlines were missed and everyone suffered. It was very neat to see how operating as a team can accomplish so much and if not organized correctly, can be more inefficient than a smaller team.[4] As discussed above, the efficiency of the hydraulic pump/motors has much room for improvement, especially when operating at low displacements. These improvements could come from optimizing existing designs, including the friction surfaces, or with new designs specifically aimed at high efficiency across a wide operating range. Another approach to improving efficiency is to implement digital valves to create virtually variable pump/motors from fixed displacement units.
One area where digital valves would be especially beneficial is in operating a hydraulic unit in both directions and as a pump and a motor. With a typical hydraulic unit, this requires compromises in the valve plate design, which could be eliminated with digitalvalves. The novel innovation presented in this paper that enables independent wheel torque control needs to be exploited for advances in the control of vehicle dynamics. While a good deal of research has previously explored these types of vehicle dynamic controls, they have primarily relied on applying braking systems to certain wheels, which is inherently inefficient. Furthermore, the high torque capability of hydraulics allows a much greater torque differential between wheels, even allowing anti-lock braking without friction brakes. This drive train architecture has the potential to spawn completely new vehicle dynamic control options.
The novel innovation presented in this paper that enables independent wheel torque control needs to be exploited for advances in the control of vehicle dynamics. While a good deal of research has previously explored these types of vehicle dynamic controls, they have primarily relied on applying braking systems to certain wheels, which is inherently inefficient. Furthermore, the high torque capability of hydraulics allows a much greater torque differential between wheels, even allowing anti-lock braking without friction brakes. This drive train architecture has the potential to spawn completely new vehicle dynamic control options.
In summary, the hydro-mechanical drive train with independent wheel torque control has the potential for excellent fuel economy in a passenger vehicle operated in an urban environment. The drive train combines a highly efficient power transmission through the mechanical branch and infinite speed variation through the hydraulic branch. Through modeling it was demonstrated that the pump/motor units typically operate at low displacements, creating poor efficiency in the current generation of pump/motors. This reveals a significant research and development project to develop units that operate efficiently in this regime. Through continued development and optimization, this drive train offers an attractive alternative to curb increasing energy consumption.
[1] "Department of Energy, Annual Energy Review 2003," DOE/EIA-0384, 2004, Energy Information Administration (EIA), Washington, D.C.
[2] Krivts, I. L., and Krejnin, G. V., Pneumatic Actuating Systems for Automatic Equipment : Structure and Design, CRC/Taylor & Francis, Boca Raton 2006.
[3] Fronczak, F. J., and Beachley, N. H. "An Integrated Hydraulic Drive Train System for Automobiles," Fluid Power, R. Heron, ed., Elsevier Applied Science,London, 1988, pp. 199-215.
[4] Bowns, D. E., Vaughan, N. D., and Dorey, R. E., "Design Study of a Regenerative Hydrostatic Split Power Transmission for a City Bus," I Mech E Hydrostatic Transmissions for Vehicle Application, Coventry, Engl, 1981, pp 29-38.
[5] Kress, J. H., "Hydrostatic Power-Splitting Transmissions For Wheeled Vehicles – Classification and Theory of Operation," Society of Automotive Engineers, No. 680549, 1968.
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
