


Published on Apr 02, 2024
The idea of ‘X-by-wire’, the control of a car’s vital functions like steering and breaks by electrical rather than mechanical links, it tantalizing to some and terrifying to other.
Aircraft may have been equipped with Fly-by-wire system for years, but do we really feel comfortable at the idea of computer sitting between ourselves and steering and breaks of our car?
What might, however, at first sound alarming actually has many benefits and whatever we as costumers may think, X-by-wire is already emerging fast. Electronic throttles, the Mercedes sensotronic break controls (SBC) and now BMW’s active front steering (ABS) in the new launches are all examples of drive-by-wire technologies.
Mercedes-Benz’s cutting edge sensotronic break control technology, used in new SL, delivers more breaking movement in an emergency and helps stabilize skid early.
Delphi’s X-by –wire is a family of advanced breaking, steering, throttle and suspension control system which function without conventional mechanical component.
For the past 25 years, by-wire systems have been used in the most advanced Flying machines known to man. Fly-by-wire is where each mechanism is controlled electronically. The mechanical linkages are removed and every movement is communicated through electric signals alone. The use of electronic motors to control movement has proven to be more responsive and a more efficient use of space and energy. Thus the by-wire control is now setting the stage for better, faster vehicles in the air and on land.
By-wire systems are a means for quick communication between the driver and the components that control the vehicle. Every action that a vehicle can make (i.e. turning, accelerating, braking) is controlled via an actuator or motor. Each motor is controlled by an electronic signal via some form of human-vehicle interface (i.e. a steering wheel, a brake pedal or throttle pedal). One of the biggest advantages is that they react more quickly and thus are more responsive than the mechanical equivalent. Conventional vehicles use mechanical linkages to actuate motion, which requires energy transfer from one link to another.
According to electronic theory, an electric current can flow through a wire more quickly and with fewer losses than virtually every mechanical arrangement. A power control module (PCM) or an (ECU) Electronic Control Unit is used to process the signals sent from brake and throttle sensors, by-wire technology allows the potential to add new operating programs to the ECU’s of by-wire vehicles. In addition to being faster, electronic actuators are lighter and take up less room.
Instead of braking at all four wheels every time the vehicle needs to slow down, the ECU processes variables such as wheel speed, g-forces, steering angle, and engine output in order to decide what brake to use. In most vehicles, braking is performed at two or even four wheels every. Thus, the ECU takes in the information read from sensors and uses algorithms to decide how to brake most efficiently and safely.
This new system eliminates the use of hydraulics completely. Instead of using a complex, heavy hydraulic system with a reservoir, hydraulic fluid and brake lines, all of that is replaced with compact, individual brake actuators located at each wheel. This system is much less complex than purely mechanical systems in the sense that it can actuate each brake individually therefore making active braking programs easy to implement.
In future automobiles will serve as the vehicle for high speed applications. Therefore it was very important to make a vehicle that has a reliable and effective brake. As discussed in the background chapter, there are two ways that brakes can be electronically controlled: electrohydraulic braking and electromechanical braking. First, the car must be capable of being manually operated.
So, one guideline was to make sure the hardware installed in the car does not interfere with the driver’s space. Secondly, the hardware must be installed in such a way that a person can drive the vehicle without having to move any components of the by-wire system. Thirdly, the by-wire system must be robust and durable. Actuators should not interfere with the driver’s space on the floor. In addition, since the actuator is mounted inside the vehicle, the actuator is protected from the elements.

Another consideration was to actuate the brake pedal with the use of a steel cable and linear actuator. This arrangement connects the brake pedal and linear actuator directly with a steel cable. The cable arrangement could be routed along the wall of the driver’s side door on the floorboard. From the floorboard, the cable could be routed up along the foot well and fixed to the armature posterior to the brake pedal. A marked advantage of using a cable system to initiate braking is that it simulates an actual person depressing the brake pedal.
Once the actuator is initiated, the motor retracts the linear actuator. Since the cable is connected to the end of the actuator rod, when the actuator receives a signal to translate backward, the actuator rod pulls the cable, thus pulling the brake towards the foot well and actuating the brake system. The cable-actuator arrangement pulls the brake pedal towards the floor. When the motor receives a signal to stop braking, the motor turns the actuator rod to the neutral position which in turn loosens the cable tension therefore releasing the brake. So, when the motor is at the neutral position, the brake is completely released.
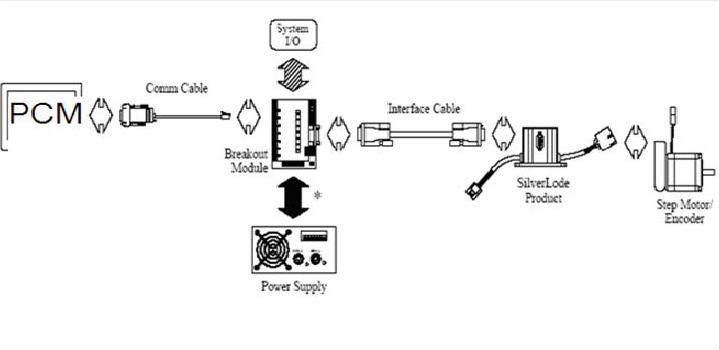
There are five components that were needed to control the Smart Motor. The car controller, the PCM, the Quicksilver Controller Interface, the Silver Nugget, and of course the steering motor. The signal starts with the car Controller and is sent to the PCM. From the PCM, a signal is then sent through the Quicksilver Controller Interface otherwise known as the breakout board to the Silver Nugget controller and amplifier.
From the Silver Nugget, a voltage signal is then sent to the smart motor. The smart motor then moves to the position corresponding to the signal that was sent. As the motor rotates, an encoder inside the motor sends feedback through the Silver Nugget and the breakout board straight to the PCM. Figure shows the flow of signal PCM to smart motor.
A new form of brake actuation should be implemented into later iterations of this project. The steering system is exceptional as it is though a new belt drive system may be in order to reduce belt slip. More safety systems such as mechanically actuated emergency stops should be incorporated into future projects as to ensure safety. Suggestions for sensors include an internal navigation system and global positioning sensors. With these sensors, the ability to make the vehicle drive autonomously will also be a possibility. Installing sensors at the wheels, steering shaft, and brakes for instance will also make it possible to quantify how much turning and braking is occurring in the vehicle. Thus, there will be a basis for comparison to measure exactly how effective the drive-by-wire system is.
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
