


Published on Nov 30, 2023
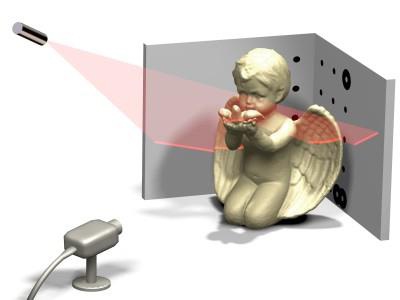
Replicating a real-world object seems to be an impossible task which can only be happened in science fiction movies. As three-dimensional, known as 3D, printing technique becomes more popular and mature nowadays, people now print a three dimensional object with 3D printing machine. The task of making replica of a real object is foreseeable. 3D scanner, a device digitizing real object, plays an important role as a complementary good for replicating real objects. In this project, the core methodology is using the projection of laser light on analysis the three-dimensional data of targeted objects. The methodology first performs the image acquisition and image analysis that followed. Image acquisition refers to capturing a series of images of different rotational angles with a line laser, which projects a line stripe on the target object. Image analysis is performed by acquiring two-dimensional data from images and combining them as a set of three-dimensional data which is called point clouds. Surface reconstruction is applied to point clouds at the last stage. The point clouds are being saved as a printable file format which can further be used for 3D printing.
Three-dimensional, known as 3D, printing is a technology realizing virtual three-dimensional. Most 3D printers consist of three movable axes, namely X, Y, Z axis, and a printing head. The movable axes are used to move the printing head to certain required coordinates so that the printing head is able to ‘print’ an object. The process of ‘printing’ is actually done by building with certain material layer by layer successively. As the technology become practical, different professional fields, such as architecture and biomedical engineering, have started to use 3D printers as assisting tools in projects. The technology has even developed as a low-cost device for domestic use. This has led to the development of its complementary product which is 3D scanning machine for 3D printing purpose. There is also a trend in developing low-cost scanning machine in the future.
Among wide range of low-cost 3D printer on the market, Reprappro is a popular series. Research has been done on one its models, Reprappro Huxley, during the Industrial Placement Scheme summer training program
In order to print objects by the 3D printer, only two things could be done in preparing a model to be printed. One is to design a three-dimensional model by related software. The other is to obtain a model from scanning a real object, which requires theoretical background and knowledge of image process. An interest is, then, developed for scanning methodology for 3D printing.
The project mainly focuses on a laser scanning methodology for 3D printing, which consists of two main objectives:
1) To study the laser scanning methodology it is to study the theoretical background of laser scanning approach, which would be the foundation of the project.
2) To replicate a real object with the studied methodology it is to apply and implement the studied scanning approach into practice. Different parameter is taken into consideration in order to improve the accuracy of the result. A result of a replicated object is expected.
3D scanning refers to the process of digitizing real-world object into digital three-dimensional model by collecting data of object’s shape and appearance. It has been developed for a long period of time, and has been widely used in some professional field, like surveying. Until now, owing to the growing popularity of the 3D printing, development of low cost, domestic use 3d scanner has become another trend of this field. This chapter gives a brief introduction of different kinds of scanning approach, and the current trend of 3D scanner on 3D printing industry.
Approach of 3D scanning can be divided into three categories: contact approach, non-contact passive approach and non-contact active approach. i) Contact approach: This approach is to collect data of an object by physically touching the object’s surface with a movable probe. The probe is used to estimate the shape of an object by recording the corresponding displacement. Contact approach is effective, but it may be destructive to the object and is of slow speed. It may also require expensive equipment to do the scanning.
This approach is to collect data by detecting the reflected ambient radiation from the object itself. One of the popular examples of this approach is stereoscopic imaging, which employ two cameras placing in a slight apart location. Data of surface of the object can be determined by calculating the difference of two images. However, it would become complicated when it is used to scan a full revolution of the object.
This approach requires emission of some kinds of radiation or light. Collection of data is then based on the detection of emission reflection from the object. An example of this approach is by means of structured light, which is effective in scanning a static object. This method is sensitive to the surface of an object, which is the best approach for purpose of getting solely the contour data of an object. Therefore, it is chosen to be used in this project. After collecting surface data of an object, the data is passed to surface reconstruction process in order to construct the mesh of it.
There are available 3D scanners on the market, and most of them use the structured-light approach in the process of scanning. Two of them would be discussed and compared as follows:
David Laserscanner is a scanning machine allowing digitalization of three-dimensional object. The process requires a camera and a hand-held line laser, which functions to capture images, and to project a laser line on the object. However, it can only do a scanning for a surface of an object. The starter kit of it is available on the market for 499€.
MakerBot is a popular brand of 3D printer. MakerBot Digitizer serves as a supplement to the 3D printer. It allows digitization of a revolution (360˚) of three-dimensional object. It is an all-in one device for scanning. It is installed with a rotational platform, camera, and a line laser. It is available on the market for 799€. The above mentioned 3D scanners have given an inspiration on this project. Both of the scanners are using structured-light approach in scanning process, which has given a proof that this approach is effective in the usage of scanning machine for 3D printer. Moreover, this project is focusing on providing a much lower cost scanning methodology when comparing to the available products.

soon as one image is acquired, a slice of cross section of the surface data is obtained. Images are acquired for every angle of the object by rotating the object for 360˚. Slices of cross section of the surface data of every angle of the object would be obtained. By combining all the image data into one single three dimensional data, the data of the whole surface of the object would then be obtained. Therefore, the process of image acquisition requires a turntable to make a rotation for the object. Since the scanned 3D mesh is formed by slices of data from each image in one revolution, the more the images are acquired, the finer the scanned mesh would be. For example, if there are only 36 images taken in one revolution, slice of the surface would appear every 10 degrees. A large gap is resulted in between each slice, which may lead to poor quality of mesh. If there are 360 images taken in one revolution, slice appears evsoon as one image is acquired, a slice of cross section of the surface data is obtained. Images are acquired for every angle of the object by rotating the object for 360˚.
Slices of cross section of the surface data of every angle of the object would be obtained. By combining all the image data into one single three dimensional data, the data of the whole surface of the object would then be obtained. Therefore, the process of image acquisition requires a turntable to make a rotation for the object. Since the scanned 3D mesh is formed by slices of data from each image in one revolution, the more the images are acquired, the finer the scanned mesh would be. For example, if there are only 36 images taken in one revolution, slice of the surface would appear every 10 degrees. A large gap is resulted in between each slice, which may lead to poor quality of mesh. If there are 360 images taken in one revolution, slice appears every one degree, the gap in between would be greatly reduced. It concludes that the more the images in one revolution, the finer the scanned mesh would be.ery one degree, the gap in between would be greatly reduced. It concludes that the more the images in one revolution, the finer the scanned mesh would be.
There are different 3D Printer models available on the market. MakerBot: Replicator 2, as shown in Figure 3. 14, and Reprappro Huxley, as mentioned in Chapter 1, are two popular models of 3D printer.

Figure 3. 15 shows a flow chart of the 3D printing process. Every printer follows the same procedure in the process of printing:
Printable File The file containing a 3D model that can be input to a 3D printer is called printable file. Examples are file with extension .STL and .OBJ. The most commonly used format of a printable file is .STL file and it would be discussed later.
As soon as a printable file is imported to the 3D printing software, the software will generate a mechanical instruction, such as .gcode file, based on the imported 3D model. G-code is a programming language for people to tell a machine on how to work. Each g-code command is specified with an instruction for movement or action of a particular mechanical part.
As soon as the g-code is ready, the process of printing can be started. The mechanical part of the 3D printer is pre-programmed with g-code command so that it will follow the sequence of the generated g-code to print the object layer by layer.
Ambient effect is another factor that would affect the accuracy of the scanning process. In this project, dim lighting environment is suggested during the scanning process. It is due to several reasons: First, as the scanning requires detection of light intensity of the laser light, the intensity of it must be bright enough for the camera to detect. For instance, some of the low quality camera may not be able to distinguish between the light source from surrounding and the intensity of laser light on the scene. It would increases the possibility of detecting a wrong position of the laser light, resulting noisy point cloud. Second, a dim environment could reduce the potential noise due to any shading effect of the ambient lighting. For instance, if the ambient lighting intensity is high, a significant shading effect by any movement of other objects or human would be applied on the object. It would also increase the possibility of resulting noisy point cloud. Therefore, in order to minimize the noise caused by ambient lighting, it is recommended to perform the scanning under dim environment.
As most home-use 3D printers are only available for single colour, this scanning method does not take colour information of the object into consideration. However, it is believed that the home-use 3D printers will be available for multiple colours in far future. One of the further developments for this scanning method is to also scan the colour information of the objects. It can be done solely by modifying the software with the use of same equipment as before. The present algorithm converts images into grayscale before doing the image analysis. No colour information is available in the process. A way to get the colour information is to do the process in parallel. A copy of image is converted into grayscale. Location of the laser line will be obtained with the same approach. After that, a parallel program takes the location of data and finds the corresponding colour value in the original image. Point cloud data of the object can be stored together with the colour information.
As a conclusion to this project, works related to the project objectives have been achieved. A laser scanning methodology has been studied. The methodology can be further divided into a few parts: image acquisition, image analysis and surface reconstruction. The methodology is applied into practice based on the studies. The practical equipment is kept simple and of low-cost that every home user is be able to use. Different parameters and methods has been considered and designed to improve the scanning quality of the scanner respectively. One of the main contributions to the project is the use of a subtraction method in the process of image analysis. The method successfully eliminates noises from the environment with a help of an extra image as reference. The method also helps in focusing the region of interest for further analysis. A number of testing has been done on different objects. Real objects are replicated successful, though the quality of the replicas is not good enough due to several limitation of this scanning methodology. The scanning methodology for 3D printing is believed to be more popular in the far future with the growing popularity of 3D printing. Further development in terms of quality and a collection of a complete data would be a trend.
1] "RepRapPro - Huxley," RepRap, 9 1 2014. [Online]. Available: http://reprap.org/wiki/RepRapPro_Huxley. [Accessed 15 4 2014].
[2] "David Laserscanner," GbR., DAVID 3D Solutions, 2013. [Online]. Available: http://www.david-laserscanner.com. [Accessed 15 4 2014].
[3] "MakerBot," MakerBot, 2013. [Online]. Available: http://www.makerbot.com/. [Accessed 15 4 2014].
[4] Reinhard Klette, Karsten Schluns, Andreas Koschan, Computer vision : three-dimensional data from images, Singapore: Springer-Verlag Singapore Pte. Ltd., 1998.
[5] Ashwin, "ASC File Format for 3D Points," 17 8 2011. [Online]. Available: http://choorucode.com/2011/08/17/asc-file-format-for-3d-points/.
