


Updated on May 29, 2026
Magneto-rheological dampers more commonly called as MR dampers. MR damper is an intelligent damper, which is used as automobile suspension for vibration control. MR fluids represent a class of smart materials that respond to an applied electric or magnetic field with a dramatic change in rheological behavior. The main advantages of MR dampers are that they need very less control power, has simple construction, quick response to control signal and very few moving parts. MR damper have received a great deal of attention in the last two decades due to their being a potential technology to conduct semi-active control. It is therefore vitally important to understand the dynamic behavior of such devices whose nonlinear hysteresis is a rather complicated phenomenon.
The behavior of MR dampers can be presented with different mathematical models. In this paper, the modes of operation of MR fluid devices are analyzed. A comprehensive review is then presented of the principles, characteristics and engineering applications of the MR fluid devices (especially dampers) studied in the last decade. Finally, the application prospects of MR fluid devices are discussed.
Magnetorheological (MR) fluids are materials that respond to an applied magnetic field with a dramatic change in rheological behaviour [1]. An MR fluid is in a free-flowing liquid state in the absence of a magnetic field, but under a strong magnetic field its viscosity can be increased by more than two orders of magnitude in a very short time (milliseconds) and it exhibits solid-like characteristics. The strength of an MR fluid can be described by shear yield stress [1]. Moreover, the change in viscosity is continuous and reversible, i.e. after removing the magnetic field the MR fluid can revert to a free flowing liquid. Using these characteristics of MR fluids, MR fluid devices have the ability to provide simple, quiet, rapid response interfaces between electronic controls and mechanical systems. Hence, scholars and industrialists have shown extensive interest in MR fluids and their applications.
The research into MR fluids has become an important branch in the field of intelligent materials. Classical MR fluids are non-colloidal suspensions of magnetizable particles, having a size of the order of a few microns, in liquids of low permeability. Devices based on MR fluids include dampers, brakes, clutches and polishing devices, and hydraulic valves, seals, composite structures, etc. In 1948 Rabinow [1] invented MR fluid and developed an application device (a clutch). In the following few years more patents and publications relating to MR fluids appeared. The main advantages of MR fluids are a yield strength of up to 50–100 kPa, which is one order of magnitude higher than ER fluids [1], insensitivity to contaminants, using 12–24 V low voltage, relatively broad working temperature range (typically 40 to 150 °C) [1]. Since the early 1990s there has been a resurgence of interest in MR fluids.
In recent years, MR fluid devices have been applied commercially to engineering fields, such as automobiles, exercise equipment and polishing machines. MR damper is becoming the most promising vibration controller in the intelligent suspension presently and it wins the favors of vehicle manufactures. Conventional damper has constant setting throughout their lifetime, and hence will not be able to operate satisfactorily in a wide range of road conditions.
It is for these reasons that semi-active systems like MR dampers have attracted the attention of suspension designers and researchers [3]. Moreover, with the increasing requirement of vehicle ride comfortable and safety, intelligent suspension will be widely adopted in normal cars and engineering automobile, consequently, it will bring broad market of automobile suspension made of MR damper
MR fluids fall into a class of smart fluids whose rheological properties (elasticity, plasticity, or viscosity) change in the presence of a magnetic field. MR fluids are suspensions of soft particles, having a diameter of 1–5 mm, in a special carrier liquid such as water, mineral oil, synthetic oil, and glycol [3]. When an external magnetic field is applied to the fluid, the suspended particles in the fluid form chains and the suspension becomes like a semi-solid material due to the increase in the apparent viscosity. Under the magnetic field, an MR fluid behaves like a non- Newtonian fluid with controllable viscosity.
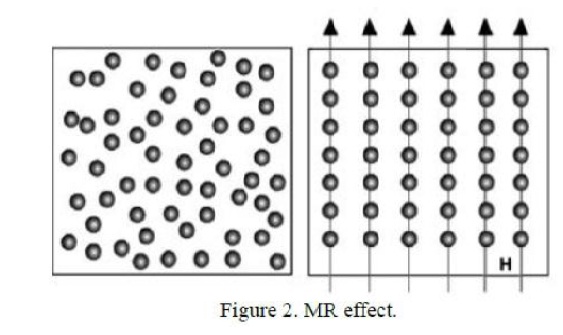
However, if the magnetic field is removed, the suspension turns into a Newtonian fluid in a few milliseconds, and the transition between these two phases is highly reversible, which provides the unique feature of magnetic field controllability of the flow of MR fluids [3].The chains form causes about 50 kPa of yield stress depending on type of MR fluids in a few millisecond, the case creates a resistance against the fluid flow.
These devices generally operate in the valve mode [1]. Typically, a MR damper consists of a hydraulic cylinder, magnetic coils and MR fluid offering design simplicity. In addition to field controllability and design simplicity, MR dampers have many other advantages such as they (i) require relatively very low power input, (ii) produce high yield stress up to 100 kPa, (iii) can be stably operated in a wide range of temperature (−40–150 ◦C) and (iv) MR fluids are not toxic and are insensitive to impurities
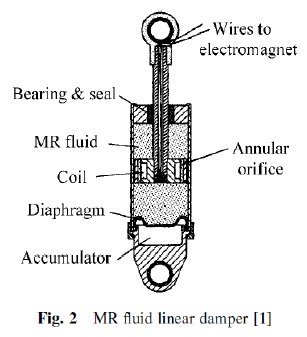
The linear MR fluid damper made by Lord Corporation (Cary, North Carolina), using the single-ended piston-rod structure, is shown in Fig. 2; this has been applied to the semi-active vibration control system for heavy-duty vehicle seat suspensions [1]. The MR fluid valve and associated magnetic circuit is fully contained within the piston. Current is carried to an electromagnetic coil via the leads through the hollow shaft. An input power of 5 W is required to operate the damper at its nominal design current of 1 A. Although the damper contains 70 ml of MR fluid, the actual amount of fluid that is activated in the magnetic valve at any given instant is only about 0.3 ml. A rod-volume compensator (e.g. the accumulator in Fig. 2) needs to be incorporated into the damper because the volume occupied by the piston rod varies when the rod moves. Proper tuning of the parameters of the feedback system greatly reduce the dangers of driving on bumpy roads.
1. Mono tube
2. Twin tube
3. Double ended MR damper
4. MR-Hydraulic hybrid damper.
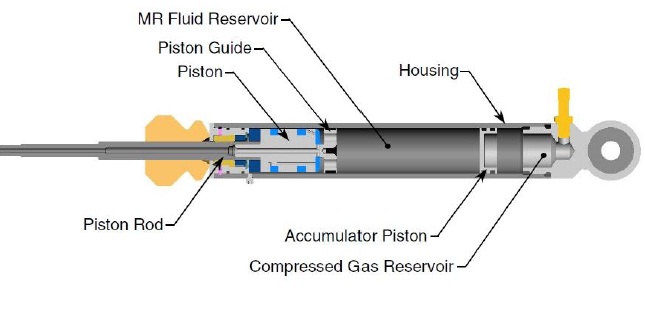
A monotube MR damper is one that has only one reservoir for the MR fluid and also has some way to allow for the change in volume that results from piston rod movement. In order to accommodate this change in reservoir volume, an accumulator piston is usually used. The accumulator piston provides a barrier between the MR fluid and a compressed gas (usually nitrogen) that is used to accommodate the necessary volume changes.
The twin tube MR damper is one that has two fluid reservoirs, one inside of the other. This configuration has an inner and an outer housing. The inner housing guides the piston/piston rod assembly just as the housing of a mono tube damper does. This inner housing is filled with MR fluid so that no air pockets exist. To accommodate changes in volume due to piston rod movement, an outer housing that is partially filled with MR fluid occurs. In practice, a valve assembly called a “foot valve” is attached to the bottom of the inner housing to regulate the flow of fluid between the two reservoirs. As the piston rod enters the damper, MR fluid flows from the inner housing into the outer housing through the compression valve that is attached to the bottom of the inner housing.
The amount of fluid that flows from the inner housing into the outer housing is equal to the volume displaced by the piston rod as it enters the inner housing. As the piston rod is withdrawn from the damper, MR fluid flows into the inner housing through the return valve. In order for a twin-tube MR damper to function properly, the compression valve must be stiff relative to the pressure differential that exists between either side of the piston when it is in operation [4]. The return valve must be very unrestrictive so that as little resistance to fluid flow as possible is provided. The damper should function properly as long as the following conditions are met:
(1) the valving is set up properly;
(2) MR fluid settling is not a problem; and
(3) the damper is used in an upright position.
With this type of MR damper, keeping the iron particles (which are an integral part of MR fluid) in suspension is a major concern since these iron particles can settle into the valve area and prevent the damper from operating properly. All MR dampers are affected by MR fluid settling, but this problem is particularly prevalent in the twin tube variety.
It has 2 piston rods of equal diameter protruding through both ends of damper.
1. Does not require an accumulator or similar arrangments.
2. Have been used for bicycle applications, gun recoil applications, and for stabilizing buildings during earthquakes.
1. These are dampers in which a small MR damper controls a valve that, in turn, is used to regulate the flow of hydraulic fluid. 2. It has been used in military applications and seismic applications.
It is not a trivial task to model the dynamic of MR dampers because of their non-linear and hysteretic dynamics. Models that can accurately represent the behaviour of MR dampers are essential in understanding the operation and working principles of the device. Such models can eliminate a great deal of uncertainties during the design process, which can subsequently enable control strategies for the damper to be developed efficiently and reliably. A mathematical model that is derived from their physical features like geometry and construction can provide insights into the way various parameters affect the performance of the device, and will allow design decisions to be made on the basis of engineering judgments.
The models can be classified into two main categories as parametric and non-parametric. Parametric models are the most desirable ones as their parameters have some physical meaning. These models consist of some mechanical elements such as linear viscous, friction, springs, etc. Parameters associated with these mechanical elements are estimated by comparing the models with experimental results. Parametric models are useful for direct dynamic modeling of MR dampers i.e. the prediction of the damper force for given inputs (voltage signal and the time-history of the relative displacement across the damper‘s ends). Nonparametric models establish a relationship between measured quantities, by purely mathematical means; the occurring parameters do not have a direct physical meaning. A literature survey would indicate that, although non-parametric models can effectively represent MR damper behavior, they are highly complicated and demanding massive experimental datasets for model validation [2]. • Currently there are different modelling techniques for MR dampers.
Following are well known-
1. Modified Bouc-Wen Model by Spencer for MR devices .
2. Recursive Lazy Learning based on neural networks
There are some problems that should be noted when applying MR fluid devices in mechanical engineering. The first problem encountered when applying MR fluid devices is the settling stability of MR fluids. The heavy particles in an MR fluid are easy to settle down without suitable additives. However, high-performance commercial MR fluids, such as the MR fluids made by Lord Corp. [1], have very little particle/carrier fluid separation under common flow conditions. Under static conditions, small variations in particle volume fraction throughout the bulk of the MR fluid do arise, but low shear agitation easily re-disperses the particle component into a homogeneous state, thereby eliminating this particle stratification.
The second problem encountered when applying MR fluid devices in many areas is the relative cost of a controllable MR fluid device compared with conventional passive devices. Major cost factors in an MR fluid device typically include: seals, rod surface finish, precision mechanical tolerances, electromagnet assembly, poles and flux conduit, and the volume of MR fluid. To decrease the cost of MR fluid devices, a new way of using MR fluids in which the fluid is contained in an absorbent matrix has been developed. Such ‘MR fluid sponge’ devices contain MR fluid that is constrained by capillary action in an absorbent matrix such as sponge, open-celled foam, felt or fabric.
The sponge serves to keep the MR fluid located in the active region of the devices where the magnetic field is applied and therefore only a minimum volume of MR fluid is required. The device is operated in the shear mode without seals, bearings or precision tolerances. The low-cost MR fluid sponge devices have potential applications in a number of engineering areas, including: vibration control in domestic appliances such as washing machines; force-feedback input devices for personal computers such as joysticks, steering wheels and mice; positioning, latching and locking elements for furniture and a host of automotive applications.
• MR fluids and MR fluid devices have been greatly advanced in the last decade and there are some commercial products have been developed.
• This technique has been developing competitively in the main industrialized countries, especially in the United States, Belarus, France, Germany and Japan.
• The key for MR fluid technology is to prepare high-performance MR fluids and to design for MR fluid devices in structures.
It can be seen that the MR fluid devices introduced in this seminar will continue to be the subject of extensive research and applications in various field as mentioned before
1. Magnetorheological fluid devices: principles,characteristics and applications in mechanical engineering, J Wang and G Meng State Key Laboratory of Vibration, Shock and Noise, Shanghai Jiao Tong University, People’s Republic of China and Siyuan Mechatronics Institute, Foshan University, Guangdong Province, People’s Republic of China.
2. M.J.L. Boada, J.A. Calvo, B.L. Boada, V. Díaz, Modeling of a magnetorheological damper by recursive lazy learning, International Journal of Non-Linear Mechanics, Volume 46, Issue 3, April 2011, Pages 479-485, ISSN 0020-7462,http://dx.doi.org/10.1016/j.ijnonlinmec.2008.11.019.
3. Nitin Ambhore, Shyamsundar Hivarale, Dr. D. R. Pangavhane, A Study of Bouc-Wen Model of Magnetorheological Fluid Damper for Vibration Control, International Journal of Engineering Research & Technology, Vol.2 - Issue 2 (February - 2013), ISSN: 2278-0181, http://www.ijert.org/view.php?id=2356&title=a-study-of-bouc-wen-model-of-magnetorheological-fluid-damper-for-vibration-control
4. James C. Poynor, Innovative Designs for Magneto-Rheological Dampers, Thesis submitted to Virginia Polytechnic Institute and State University, Aug 7, 2001.
5. http://www.formula1-dictionary.net/damper_magnetorheological.html
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
