


Updated on May 29, 2026
Magnetic bearing is a bearing which supports a load using magnetic levitation. Magnetic bearings support moving machinery without physical contact, for example, they can levitate a rotating shaft and permit relative motion without friction or wear. In active magnetic bearings (AMB) a stable equilibrium is achieved by means of one or more control loops. The use of control loop for maintaining the gap between the shaft and bearing differentiate the active magnetic bearings (AMB) from passive ones. They are in service in such industrial applications as electric power generation, petroleum refining, machine tool operation and natural gas pipelines
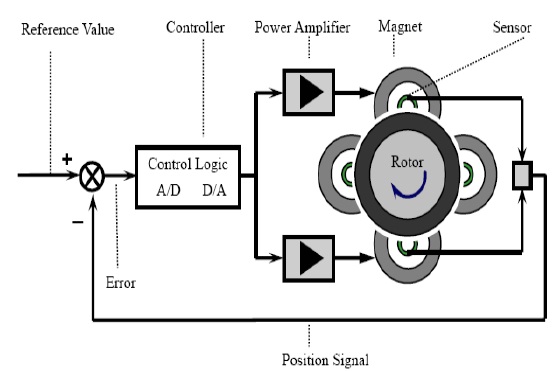
The typical AMB system diagram is illustrated in above figure. Besides the controller, the general control system also includes the sensor, A/D and D/A conversion and power amplifier. The rotor’s displacement along one of the axes is detected by the position sensors and converted into signals of standard voltage. Then compared with the setting value, the error signal enters the controller. After A/D conversion, the controller processes this digital signal according to a given regulating rule (control arithmetic) and generates a signal of current setting. After D/A conversion, this current signal enters the power amplifier, whose function is to maintain the current value in the electric magnet winding at the current level set by the controller. Therefore, if the rotor leaves its center position, the control system will change the electromagnet current in order to change its attraction force and, respectively, draws the rotor back to its balance position.
Active Magnetic Bearings (AMBs) with their control system inherently offer the possibility of continuously recording bearing forces and rotor displacements. This allows on-line monitoring of critical process parameters and early detection of incipient faults, such that reliability is increased. Furthermore, AMBs can actively influence a machine's behavior. Thereby, operation can be adjusted and optimized according to process changes.
AMB systems are often used to control structural resonance frequencies coming from the rotor or from elastic supports. The resonance frequencies may vary significantly with the rotational speed. Controller design for AMB systems is therefore important for the system performance. Controller design requires a plant model. Identification, i.e. modeling based on dynamic measurements, is a fast way for obtaining such a model. Both controller design and identification are topics of current research.
The radial and axial magnetic bearings are located in the generator. In order to reduce the range of products, magnetic bearings for generator rotor and turbocompressor rotor are designed as the unified size according to the generator rotor load in operation condition. The radial bearing radial gap is 0.15mm considering the gap of 0.4mm between the compressor stator and blades in order to protect the compressor.
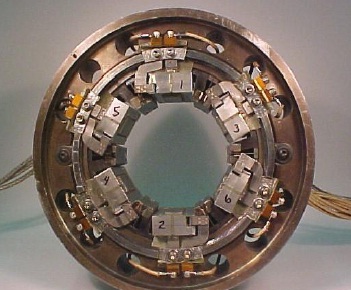
The rotor displacements in radial and axial are monitored by the position sensors, which are of induction type. The sensor consists of sensitive elements located on the stator and an acting element located on the rotor in front of the sensitive elements. The sensitive element is an annular magnetic circuit with 24 poles, of which each 6 poles are grouped to detect the radial displacements in X and Y directions. In such design, a kind of 2/3 redundancy working mode for sensor signals can be easily realized. The acting element is an extension made of the laminated ferromagnetic steel, which is fixed on turbomachine shaft. Windings around the stator perimeter are distributed in order to average and smooth the measure value. This kind of sensor has good sensitivity of no less than 10mV/μm and resolution of at least 1μm. Its cut-off frequency is enough so high (>5k Hz) that the phase lag at operation frequency can be neglected. The voltage signal after the sensor modulator can be transferred more than 200m without obvious attenuation.
The controllers, as well as all its peripheral equipment, including A/D, D/A, network card, etc., is standard industry type, usually selected as high speed Digital Signal Processing (DSP) computer, which has good stability and excellent hard real-time interrupt processing capability. For example, the new DSP product of TI 6713 has powerful floating-point operation of 1350 MFLOPS and can be adopted as the ideal micro processor of the controller. The A/D converter has 10 channels with 500kS/s rate and 16bit precision, while the D/A converter have 5 channels with 1MS/s rate and 14bit precision. The controller shall have the following functions:
(1) Receive information about displacement, rotation speed and angular position of the machine rotor from the sensor converters;
(2) Receive the control commands from the operation computer to change some parameters of the AMB control system;
(3) Generate and release the current control signals in coil windings according to the specified algorithms and control commands;
(4) Diagnose the states of the elements of the AMB system and transmit this information to the operator computer via networks;
(5) Release signals about alarm and emergency protection.
The operating and monitoring computer (host) lies on the high level control channel, whose type is standard PXI industry computer and its operation system is universal MS Windows. The typical configuration of the host computer can select the NI with 2.3GHz Pentium 4 CPU. The communication between controller and host computer is based on industry network. The main functions of the host computer are listed in the follows:
(1) Establish and change the control algorithms or rules of the AMB;
(2) Start up and stop the AMB control system;
(3) Receive information about the states of AMB components and display this information by different graphical means on the monitor;
(4) Diagnose controller state and make decision;
(5) Log and print information about the state of the AMB control system components;
(6) Send process information to the Instrument and Control (I&C) system of reactor plant.
The power amplifier receives the control signal in analog voltage from the controller and keeps the current in the magnet winding according to this voltage signal. Generally speaking, power amplifier is a kind of controlled constant-current source to the inductive reactance. As the power of single amplifier unit is about 4.5kVA (300V, 15A), switch amplifier is the best type considering the losses and efficiency. In order to reduce the drawback of switch amplifier of sharp oscillation impulsion at stable operation state, special method is selected to realize a relative smoothly current, such as three-state voltage level, two H-bridge connecting in series, high switch frequency of 60k Hz and so on. The phase lag is less than 3° at 200 Hz to achieve good dynamic characteristics.
Synchrony has developed a line of high temperature magnetic bearings for aerospace and defense applications. The bearings are specifically designed for use in next generation gas turbine engines, where high temperatures and high rotational speeds preclude the use of industrial magnetic bearings.
Advanced features of the high temperature magnetic bearings include:
High temperature coils and magnets reduce cooling requirements and improve efficiency and power density at temperatures to 1000°F
Redundant magnets, signal processors, sensing, and amplification ensure continuous operation
Integrated, high temperature sensors reduce the size and improve the performance
Compact, light-weight magnetic structure increases power density
Advanced, magnetic flux control algorithms improve the performance and dynamic stability
Inertial Balance System automatically and adaptively compensates for unbalance, reducing vibration and power consumption
These magnetic bearings are used with Synchrony's compact digital controllers to provide a total solution for high power density, rotating machinery.
Elimination of leaks, flash, contaminants
Direct-drive, direct-coupled machines (no gearbox)
Accurate, dynamic control of rotor position & stability
Improved rotor dynamic performance through more compact designs, shorter shafts and bearing spans and the possibility of multiple bearing systems.
Absence of mechanical contact between shaft and bearing.
Very low wear rate.
Low power dissipation in the bearing.
Absence of lubricants.
High speeds of rotation.
Possibility to adjust position between the shaft and the bearing.
Unbalance compensation.
Ability to work in a broad spectrum of temperatures, in vacuum, in aggressive surroundings, etc.
Low vibration.
Magnetic bearing advantages include very low and predictable friction, ability to run without lubrication and in a vacuum. Magnetic bearings are commonly used in watt-hour meters by electric utilities to measure home power consumption. Magnetic bearings are also used in high-precision instruments and to support equipment in a vacuum, for example in flywheel energy storage systems. A flywheel in a vacuum has very low windage losses, but conventional bearings usually fail quickly in a vacuum due to poor lubrication. Magnetic bearings are also used to support maglev trains in order to get low noise and smooth ride by eliminating physical contact surfaces. Disadvantages include high cost, and relatively large size.
Magnetic bearings allow contact-free levitation. This offers a number of interesting advantages. Magnetic bearings do not require lubrication, they allow high circumferential speeds at high loads, they do not suffer friction or wear, and therefore they offer a virtually unlimited lifetime while no maintenance is needed. Furthermore, the bearing force can be modulated, either for compensating unbalance forces, or for deliberately exciting vibrations. Because of these advantages, they are used in an increasing number of commercial high-performance applications in the domain of rotating machinery. These include ultra-high vacuum pumps, canned pipeline compressors and expanders, high-speed milling and grinding spindles, flywheels for energy storage, gyroscopes for space navigation, spinning spindles, and others.
[1] "Department of Energy, Annual Energy Review 2003," DOE/EIA-0384, 2004, Energy Information Administration (EIA), Washington, D.C.
[2] Krivts, I. L., and Krejnin, G. V., Pneumatic Actuating Systems for Automatic Equipment : Structure and Design, CRC/Taylor & Francis, Boca Raton 2006.
[3] Fronczak, F. J., and Beachley, N. H. "An Integrated Hydraulic Drive Train System for Automobiles," Fluid Power, R. Heron, ed., Elsevier Applied Science,London, 1988, pp. 199-215.
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
