


Updated on May 29, 2026
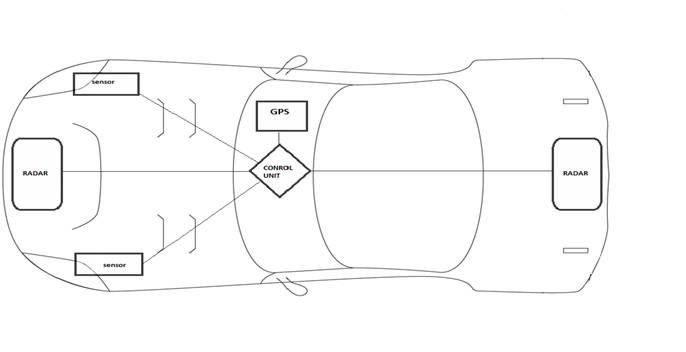
The word “Auto pilot” mode here refers to the process of implementing the advanced technology in vehicles which enables it to self-drive in high way roads without the control of the humans. This process is going to be achieved by the use of Radars, Sensors and Advanced GPS maps. First a compact path of the place where user wants to go is selected on the GPS map.
When the engine is started, all equipment’s will start to take positioning. The readings are obtained from the radar every second. It detects the objects at the limit of 180’ angle and continuously feed the control unit. This control unit is built with a lot of conditions that makes the vehicle to move in the possible safe directions. Here 50% of the job is done by the radar equipment’s and rest of the job is done by the advanced GPS mapping to make a safe journey. Separate signals are obtained from the ground level to detect the speed breakers and conditions of the road. Same set of equipment’s is fixed on the rear side of the vehicle to avoid other vehicles hit on rear side of the user’s vehicle.
This Auto pilot mode Technology is a research project. By implementing this technology in vehicles enables it to self-drive in the highway roads without the control of the humans. This technology creates a new revolution in the Automobile and transport field. It helps the user to save their valuable time which is wasted while driving and it is not necessary for the drivers to be always seated in the driver seat except the places, where the signals and road counters present. Many accidents are occurred due to the carelessness of the drivers. This can be avoided by implementing this Autopilot mode technology. In this technology many advanced equipment’s are going to be used to make a safe journey. This Autopilot mode technology is going to be created by the combination of various departments in Engineering. But among these departments of Engineering four departments are going to play a major role.
They are Mechanical, Electronics, Information Technology and Computer science departments. Mechanical department is going to take care of all the mechanical movements of the vehicle. Electronics department take care of the fetching of programs made by the programmers in the controlling unit and for its proper functioning. Information technology and computer science departments are going to be the back bone of this technology. Programs made by the programmers are going to be responsible for the working conditions of the control unit. Let us see the components and working of this technology in following paragraphs. A discussion about this technology is already made by HONDA UK in 2006 but it has many draw backs and they don’t explain about the working of this technology. I had created a new way to overcome from this draw backs and I had explained about this process in detail in the following paragraphs in my own creation.
This technology contains four major components. They are,
RADARS
SENSORS
ADVANCED GPS MAPPING SYSTEMS
DISPLAY UNIT
This technology depends up on the components which are represented above. First the compact map path to the place where the user wants to go is selected on the GPS maps in the display unit. When the user starts the engine all the equipment’s will take positioning. The readings are obtained from the radar every second. It detects the objects at the limit of 180’ angle and continuously feed the control unit there by moving the vehicle in safe and proper directions. Control unit is built with a lot of conditions that makes the vehicle to move in the possible safe directions according to the readings from the radar, sensor and GPS maps.
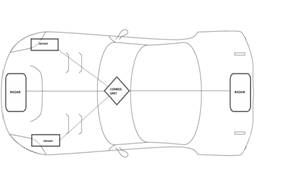
Here 50% of the job is done by the radar equipment’s and rest of the job is done by the advanced GPS mapping to make a safe journey. Separate signals are obtained from the sensors which are kept at the bottom of the car straight to the wheel to detect the speed breakers and road damages which help the vehicle to de-accelerate in the speed breaker and damaged road areas. Advanced GPS mapping technology makes the car to remain in the Indian rule of “keep left”. It synchronizes the vehicle and the road. This only helps the vehicle to turn properly during the curves. Same set of the equipment’s is fixed on the rear side of the vehicle to avoid other vehicles to hit the user’s vehicle during de-acceleration, curves and overtaking.
Radar is an object detection system that uses electromagnetic waves to identify the range, altitude, direction, or speed of both moving and fixed objects such as aircraft, ships, motor vehicles, weather formations, and terrain. The term RADAR is defined as radio detection and ranging. A radar system has a transmitter that emits radio waves. When they come into contact with an object they are scattered in all directions. The signal is thus partly reflected back and it has a slight change of wavelength (and thus frequency) if the target is moving. The optimal range can be fixed as 50m.The receiver is usually, in the same location as the transmitter. Although the signal returned is usually very weak, the signal can be amplified through use of electronic techniques in the receiver and in the antenna configuration. This enables radar to detect objects at ranges where other emissions from the target object, such as sound or visible light, would be too weak to detect.

From the above picture it has been observed that the radar signals are transmitted and readings of the detected object is received by the reflected signals from it in front of the car. By the radar readings the control unit automatically accelerates and de-accelerates the car. In case object in front of the car moving slowly means then the control unit will go for the “overtaking” mode.
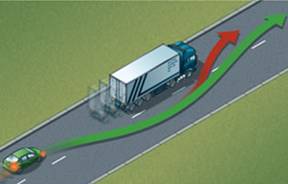
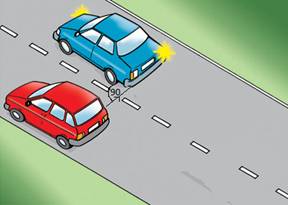
Before overtaking it is necessary to analyses what might go wrong while overtaking. This mode will find the possible direction and space to overtake the object in the front to move ahead. How this process works means; at first the signal from the front radar is obtained that, object is present in the front of the car. Now the radar will analyze whether it is possible to overtake. If it is possible means the vehicle will try to overtake.
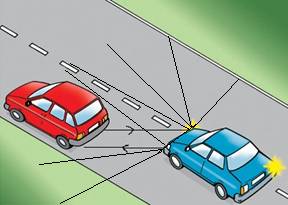
There is a possibility for the vehicle to hit the object while steering left during overtakes. A constant signal of 90 degree is obtained from the front radar detecting that an object is present in left.
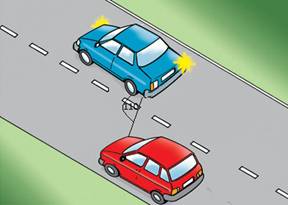
After the front radar crossed the vehicle, readings will start to come from the rear radar. This will indicate that the object is still present and now cannot steer left. A constant reading will be taken from the rear radar as 90 degree. This will not change until the rear radar crosses the object.
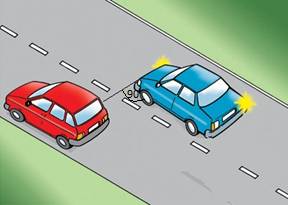
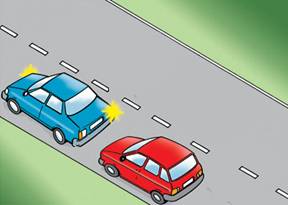
When the back radar crossed the object the angle 90 degree will start to increase. This detects that the car had crossed the object. A particular degree is denoted in the program, when the vehicle has to steer. 110 degree is enough to steer the vehicle safely.
Thus the overtake mode is achieved successfully. This is how the process is going to work.
Radars cannot detect the road condition as it is kept at the bumper of the car. So, separate sensors are kept near the wheel to detect the road conditions.
A sensor is a device that measures a physical quantity and converts it into a signal which can be read by an observer or by an instrument. Here sensors are kept near the front wheel there by focusing the road as shown at an angle of 160 degree.
The sensor will always focus the road like a stick from the car. A constant reading will be provided from the sensor to the control unit. When the angle changes due to any speed breaker or road damage, the sensor will automatically makes the control unit to slow down the car. If the value crosses the critical value the car will be stopped immediately because, there may be any huge damage.
By implementing this Autopilot mode technology will surely reduce the occurrences of road accidents by a considerable value. In the future, the wide acceptance of my technology will create an “Accident free world”.
[1] Merrill I .Skolnik’s “Radar Handbook” January 1, 1990.
[2] “GPS Land Navigation” by Michael Ferguson, Randy Kalisek, Leah Tucker September 1997.
[3] “Sensor Technology Handbook” by Jon S.Wilson August 2 2006.
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
