


Published on Nov 30, 2023
The world is facing an environmental crisis unprecedented in human history. This has caused a depletion of fresh water sources. There is an acute shortage of drinking water and unsustainable stress is being imposed on drinking water sources.
In the prevailing political climate, the tariff cannot be linked to the actual cost of water extraction and distribution of water. The tariff is therefore very low. The present water distribution slab system is based on tariff. There is an approximately 40% increase in the tariff as we move to the higher slabs. However, there is no limit on the total volume consumed in the present system. This system has failed because consumers have a high purchasing power. Therefore there is no perceptible reduction in the volume of water consumed and its wastage.
Our project, the Smart Water meter using wireless networking, proposes a new slab system based on total volume to be supplied. Limits are set by the water board (BWSSB). After reaching a predetermined cap water supply is terminated completely for that month automatically. The consumers are given prior warnings through SMS system.
Any fault or meter tampering can be detected automatically. The distribution valve can be remotely controlled by the water supply Board for reset and close. A database consisting of user details, water consumption details is maintained and updated on a monthly basis on the local server which can be used for billing purposes and hence eliminating the need for third person data collection. In the event of power failure the smart water meter does not get reset.
In the next phase of the technical development we have also worked on raspberry pi which incorporate the higher end technologies like IoT, Wi-Fi, cloud database and web application.
Use of Internet has increased exponentially in the last decade or so. Approximately half of the world's population uses Internet. Similarly deployment of IoT based applications is increasing rapidly now. The idea of IoT is to form an Internet of computing devices or objects with sensors which are connected with computers or mobile phones, operated or monitored by human beings. IoT can be expressed as a wireless network layer on top of the Internet where millions of things are continuously tracked, monitored and managed by people all over the world. It is said that by the year 2020 more than 50 billion objects will be joining this network. IoT technology has been widely used in different sectors like, Healthcare, Agriculture, Education, Industrial and many more . Different applications of IoT like Smart building, Smart board teaching, Smart Meters, Smart Parking, Smart Tracking, Smart Health, Intelligent Traffic Management, Environment Monitoring, Waste Management, Air Quality Monitoring, Smart Lighting and others have been proposed and implemented. Smart water metering is one of the upcoming applications of IoT.
In today‘s hi-tech era people don‘t have time to do all the tracking and monitoring tasks on daily basis. IoT connects different types of devices, objects and people together to communicate and exchange data or information to solve many problems which make theroutine easy and simple. Planning and scheduling of task can also be done easily if our objects are on internet. We can synchronize daily activities without stressing our mind. As a result there are technological developments going on for Things Identification Mechanism (Tagging Objects / Addressing Things), Wireless sensing mechanism (Sensors / RFID), Embedded Systems (Microprocessors / OS), Data Management Technology (Data Mining / Big Data)
Capable of implementing the volume based slab system. After reaching each limit the consumers are informed and cautioned through an SMS and email.
Detect meter tampering without human intervention. On tampering shut down the valve and inform the user and water Board about the fault type occurred.
Digitized reading & communicates with the Board of Control using GSM module.
Board monitors the consumption & regulates it. Automatic bill generation using the Database.
More economical for the users. Saved water can be channeled to areas suffering from water scarcity.
Consumers are provided with water supply at a subsidized rate below the specified consumption limit.
After which the consumer is charged at a penal rate up to the next consumption limit. The second consumption limit is the absolute cap.
Periodic warning message will be sent before they exhaust all the limits. When consumption exceeds the cap, action for complete closure of the valve and termination of water supply for that month is initiated automatically.
The consumer is kept informed by the water Board through an SMS system using GSM module, programmed using AT commands.
At the end of each month the meter gets reset for the next month when it receives a reset command from the remotely located water board.
Implementation of slab system and allotment of specified amount of water for each consumer is done according to predetermined standards.
The water Board controls the opening and closing of the valve by sending required signals to the water meter.
Fault diagnosis is better since the water meter monitors the data coming from the flow sensor when the valve is open, which results in less water wastage.
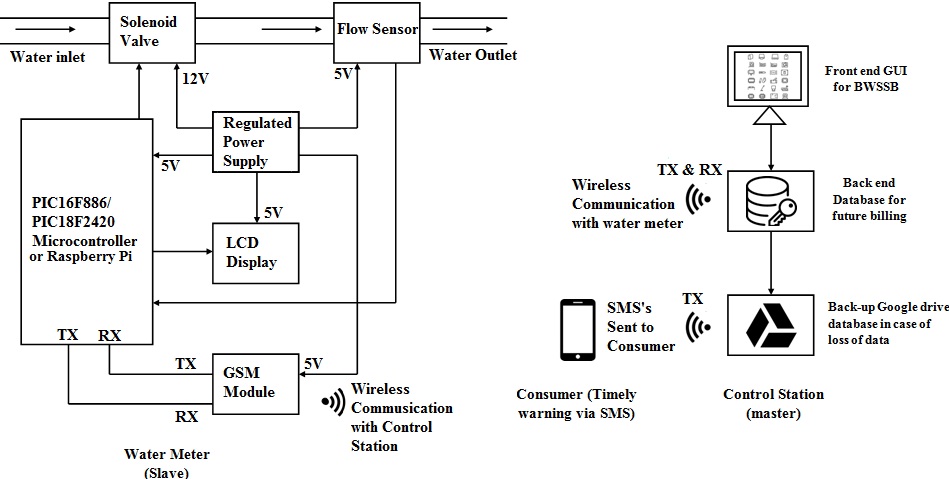
PIC microcontroller (PIC16F886/PIC18F2420) ,Water Flow Sensor , Solenoid Valve, G768 Box, GSM Module (SIM800A), Adaptor, RS232 to USB convertor module, DC Power Supply Circuit, Relay Driver Circuit, LCD Display (2 x 16), PICkit 3, 6.1 Raspberry
Smart water metering is defined in[29] as the system where smart meters provide meter reading data by monitoring water usage and transfer the consumption data frequently to the utility office, where it is integrated with the business system, like Billing System and the information is also shared with the customers via SMS or web portal. Using smart meters the water consumption data can be gathered automatically without physical visit by a human. Smart water meters can be used to find the solution for the problems like, Water losses, water quality, disasters and drought. Basic Components of Smart Water Metering System. Fig 2 shows the basic components of smart water metering. Figure 2. Smart Water Metering System Components Smart Water Meter components are used in such a way that they can solve many problem of routine life related to water. Like Waste water management, Prevention of water losses due to leakage problem, Managing water quality and water level etc.. To achieve this goal we require a generalized framework architecture which can help easy and efficient implementation of smart water metering system.Many researchers have tried to give a generalized framework for IoT applications. Where Neeharika[10] has proposed an architectural framework for IoT based water meter.
Shahanas[25] has proposed an architecture for implementing smart water monitoring system. It includes basic three units . 1. Collecting water level from the tanks using sensors, 2. Transmit the data to a centralized server using Arduino and Raspberry Pi. 3. Visualizing the data through a web interface and also in the cloud using Ubidots cloud Platform. SMS and email alert system are also included as a part of user interface. Ankith S et.al.[4]have proposed a design of smart water flow meter system for India. They have designed a prototype using HTTP Compatible CoAP based monitoring and control system. They have compared their system with the other [18][19][20] smart water meter reading systems and automated meter reading systems which are using ZigBee wireless technology for communication between water meters and base stations and data concentrators. In their proposal they have used 6LoWPAN protocol for wireless communication and they have tried to prove that it has more advantages over ZigBee. They stated that 6LoWPAN is more suitable for IoT based applications because using 6LoWPAN protocol sensor networks can be directly connected to the Internet without IP conversion. Proposed system‘s prototype is simulated using ContikiOS, MySQL database and visual studio for web application which provides GUI to the users for the interpretation of usage data in the graphical way.
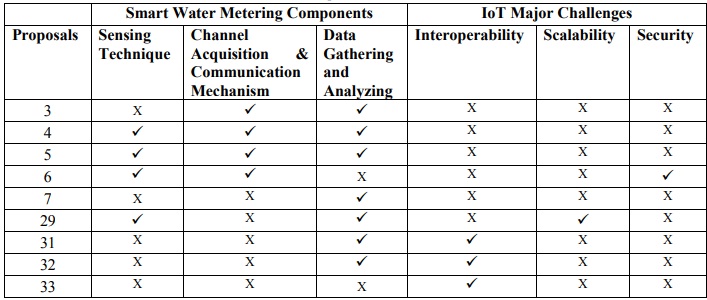
The comparison shows that most of the proposals are all vertically defined according to the situation and need. Some are talking about communication protocols; some are talking about data gathering techniques. Further there are different solutions for water flow measuring, leakage management, billing patterns, cloud computations etc…but not a single solution provides flexible, generalized framework which can be suited for any scenario at any location for the implementation of smart water metering system. Hence it is required to set a framework in which any type of smart water metering system implementation becomes easy.
The proposed Smart Water Meter can solve most of the problems faced by the existing meters. Though maximum efficiency of the proposed meter is not attained, there is scope for future up scaling and further improvements.
Instead of installing a single meter per house, provisions can be made to allow separate monitoring of water usage in each sections like kitchen, bathroom etc. It can then individually monitor and regulate the water consumed.
All the additional infrastructures made can be automated further with higher precisions. By knowing the accurate consumption of water in different sections of the same house, it is possible to know if there are any leakages. Leakages or theft if present can be debugged individually, which can be fixed easily.
Added consumer friendly facilities such as online bill payment can be provided by linking the Adhaar number present in the database of the water Board.
The Smart water meter is automatic and does not require much human interference, thereby reducing the errors. To make it tamper proof, the meter shuts off immediately and sends the type of fault to the water Board. In addition to the above it includes the new system proposed wherein, the slab wise implementation is linked to the volume of water distributed in contrast with the existing system based on tariff. There are two implementations of the Smart Water Meter; they are using PIC microcontroller and Raspberry Pi. Using PIC microcontroller, water consumption details and limit status are sent to the control station via text messages (SMS) and that data gets uploaded in the local database and is displayed in the frontend (GUI). In the Raspberry Pi implementation, we use Wi-Fi to upload the water consumption details into the cloud. From the cloud it gets uploaded into the database. The limit based slab system helps in regulating water distribution. This provision is not present in the existing meter.
[1] Agrawal, Shashank, and Dario Vieira. "A survey on Internet of Things-DOI 10.5752/P. 2316- 9451.2013 v1n2p78." Abakós 1.2 (2013): 78-95
[2] Al-Fuqaha, Ala, et al. "Internet of things: A survey on enabling technologies, protocols, and applications." IEEE Communications Surveys & Tutorials 17.4 (2015): 2347-2376.
[3] Andrea Zanella et al. Senior Member, IEEE, ―Internet of Things for Smart Cities‖, IEEE Internet of Things Journal, vol. 1, no. 1, Feb. 2014.DOI: 10.1109/JIOT.2014.2306328
[4] Ankith, S., et al. "Design of IPv6 Network enabled Smart Water Flow Meter System for India."
