


Updated on May 29, 2026
There are many paradigm shifts taking place due to information explosion and the concept of autonomous vehicle is one shift. The car, which is embedded, can simulate the human driver completely and direct the vehicle on the road. Autonomous vehicle is the drastic change in technical brilliance and developments in different fields with EMBEDDED SYSTEM as pioneer.
A fully computerized car capable of doing almost everything a car lover would want to. Almost all automobiles will interact with computer on dashboards. From ordering pizza to booking tickets at the nearest theatre, things would be as easy as giving orders to your servant. As a matter of fact, vehicles all over the world are now fitted with intelligent devices that make the vehicles to respond to various factors -be it climate control, sudden accelerations or braking or even self-repair of modules.
The finger print technologies have been introduced to enter and start your car with the touch of a finger. The fingerprint, which is acting as a key, would trigger a check of the mirrors, steering wheel, radio and temperature to ensure that they're the way you like them. The convenience of fingerprint recognition technology comes with heightened security. Unlike personal identification numbers, passwords and keys, each person's unique fingerprints can't be duplicated, lost or forgotten
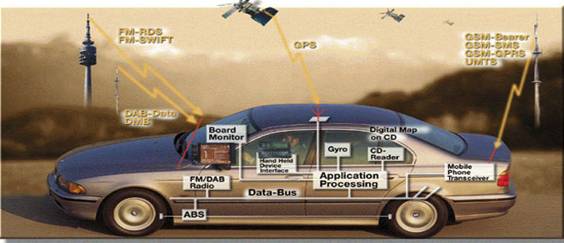
The models for GPS also include aiding sensors, e.g. dead reckoning, radar and camera. A computer is simply required to feed destination into a dashboard computer. Highly sensitive actuators simulate a human driver completely and direct the vehicle on the road. The vehicle transmitter broadcasts its position and velocity to other immediate participants for collision-avoidance and lane changing manoeuvres. Forward and reverse motions and u-turns are precisely achieved as per route guidance requirements. Furthermore, an accurate steering control is obtained using Pulse Code Modulation technique and acceleration/braking control is successfully implemented using learning adaptive system
The reliability, efficiency and cost effectiveness of an autonomous vehicle depend mainly on how judiciously its navigation sensors, perception unit and computer control is incorporated.
The driver's activity is influenced by several factors that depend on driver itself and is environment such as traffic density, traffic status, time of travel and weather. Thus the driving activity deals with a combined driver vehicle-environment system
The vehicle is required to blend its environmental perception capabilities with its intelligent controls in order to affect optimal path-planning strategies that not only avoid obstacles but also minimize criteria such as time of travel, fuel consumption, exposure to pollution/danger, etc. however basic driving functions consists of lane-keeping, safe distance maintenance, timely lane changing and overtaking. The key to all these driving tasks is collision avoidance.
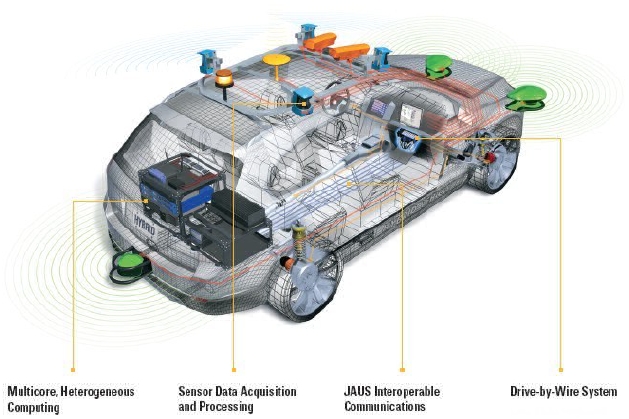
Multicore, hetrogeneous computing LabVIEW applications on two HP dual quad-core servers performed sensor data and image processing and ran decision-making and planning modules.CompactRIO managed the lowerlevel vehicle interface. An NI touch panel in the dashboard helped switch between autonomous and manual operation modes. Heterogeneous computing systems refer to electronic systems that use a variety of different types of computational units.
A computational unit could be a general-purpose processor (GPP), a special-purpose processor (i.e. digital signal processor (DSP) or graphics processing unit (GPU)), a co-processor, or custom acceleration logic (application-specific integrated circuit (ASIC) or field- Dept. ECE, CEMP ROBOTIC CAR 15 programmable gate array (FPGA)). In general, a heterogeneous computing platform consists of processors with different instruction set architectures (ISAs). A multi-core processor is a single computing component with two or more independent actual processors (called "cores"), which are the units that read and execute program instructions. The data in the instruction tells the processor what to do.
The instructions are very basic things like reading data from memory or sending data to the user display, but they are processed so rapidly that human perception experiences the results as the smooth operation of a program. Manufacturers typically integrate the cores onto a single integrated circuit die (known as a chip multiprocessor or CMP), or onto multiple dies in a single chip package Sensor data acqisition Sensor data acqisition and processingLabVIEW applications running on multicore servers with Linux and Windows OSs processed and analyzed data from three IBEO ALASCA multiplanar LIDARs, four SICK LMS LIDARs, two IEEE 1394 cameras, and one NovAtel GPS/INS. Ethernet cables acted as the interface for all sensors.
sensor data acqisition means gathering of the data that the sensors are providing which collected from the current enviornment, then the collected data is processed here. JAUS interoperable communications LabVIEW helped develop and deploy a set of tools for JAUS, an autonomous ground vehicle standard for passing messages and status information among various vehicle subsystems. This SAE AS-4 JAUS interoperable architecture was designed for use in other autonomous applications as well.
Drive by wire system Drive-by-wire, technology in the automotive industry replaces the traditional mechanical control systems with electronic control systems using electromechanical actuators and human- machine interfaces such as pedal and steering feel emulators. Hence, the traditional components such as the steering column, intermediate shafts, pumps, hoses, belts, coolers and vacuum servos and master cylinders are eliminated from the vehicle.
The equipments and technologies used are costly the main equipments used in this technology are radar ,lidar, position sensor, gps module,Multicore, hetrogeneous processor, JAUS interoperable communication systems, high resolution cameras are very costly now
Complex artificial intelligence software the brain of the robotic car is its intelligent real time decision making software te design and implimentation of this part of the system is much more complicated
Present road conditions may vary and which will affect the decisions made by the software since our system is mainly based on pure artificial intelligence, the non ideal conditions and decisions made by other human drivers may vary. This may affect the ideal operation of the robotic car
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
