


Published on Nov 30, 2023
The human brain is made up of billions of interconnected neurons; the patterns of interaction between these neurons are represented as thoughts and emotional states. Every interaction between neurons creates a minuscule electrical discharge; alone these charges are impossible to measure from outside the skull. However, the activity created by hundreds of thousands concurrent discharges aggregates into waves which can be measured [1]. Different brain states are the result of different patterns of neural interaction. These patterns lead to waves characterized by different amplitudes and frequencies. For Example waves between 12 and 30 hertz, Beta Waves, are associated with concentration while waves between 8 and 12 hertz, Alpha Waves, are associated with relaxation and a state of mental calm. All electrical appliances produces similar waves, thus it create some level of ambient noise interferes with the waves emanating from the brain, and this is why most Electroencephalogram -EEG devices will pick up readings even if they are not on a person’s head. With this application, we can easily find out the necessary action should be performed by the user automatically with the help of mind wave sensor and we can give input or command to the particular application or devices to do specific task.
The brain controlled robot basically works on the principle of capturing the brain wave signals utilizing it for the movement of robot. This when equipped with the wheel chairs of disabled persons who can’t speak or move their hands will be useful for their movement independently. Here the brain wave analysis is being performed, the brain thoughts 1 is not being captured instead the brain concentration level is being measured. This robot can be utilized for multiple purposes. Here the User Interface can be developed in java & the robot can be serially controlled from PC. This can be done by wirelessly controlled using Bluetooth module, for increasing the range GSM module also can be used. If the API is developed in android then it also can be controlled using an android platform based embedded device.
However, BCI development is no longer constrained to just patients or for treatment, there is a shift of focus towards people with ordinary health. Especially gamers are becoming a target group that would likely to be adaptive to use EEG as a new modality; giving them advantages or new experiences in gameplay. It is not just treatment in mind, but entertainment also. This shift could benefit patients, because when EEG technology becomes more available, and the powerful gaming industry gets involved, they can become the same driver for improvements as they are for all silicon-based technology: needing, and thus getting, faster processors and graphic engines so they can create better games.
By taking BCI to the level of entertainment, the motivation for making more user friendly, faster, cheaper and public available systems will be totally different and become of a much higher priority. The targeted groups of users are not forced toutilize BCI systems, and thus needs better reasons for wanting to, other than it is cool to be able to control your computer with the mind. Current systems do not meet such standards.
Millions of people around the world suffer from mobility impairments and hundreds of thousands of them rely upon powered wheelchairs to get on with their activities of daily living. However, many patients are not prescribed powered wheelchairs at all, either because they are physically unable to control the chair using a conventional interface, or because they are deemed incapable of driving safely. In this project, we aim to develop a Brain Computer Interface-BCI application using EEG to control robotic wheel chair in real time that will help the physically challenged to lead an independent life with the help of their brain signals.
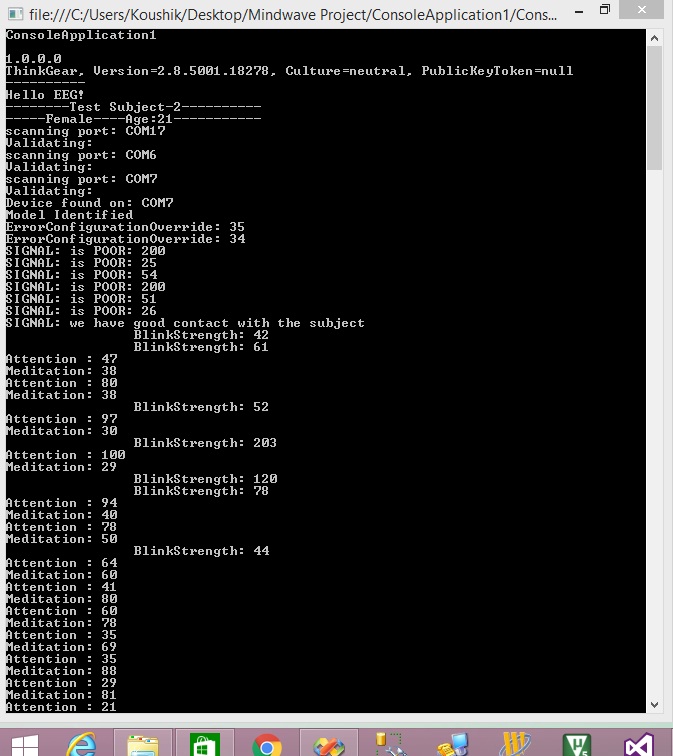
The brain signals used here are Spontaneous EEG signals. These signals are associated with various aspects of brain function related to mental tasks carried out by the subject at his/her own will. The mental tasks such as meditation, attention, eye blinks are used for forward, reverse, sideways and stop actions of robot .
The brainwave starter kit makes use of dry sensors which does not require application of a conductive gel between the sensors and the scalp. Also this device is much lighter and convenient for usage when compared to the conventional EEG sensors as it requires only one electrode for sensing. Another advantage of using this kit is that the data or brain signals are transmitted to the signal processing unit via Bluetooth connection.
The signal processing unit used in this application is a laptop/PC. The brain signals are transmitted from the headgear via Bluetooth to the laptop. The digitized value is then passed on to suitable microcontroller through USB port or through wireless communication for further mapping of brain signal values to control signals of the motors.
An H bridge is an electronic circuit that enables a voltage to be applied across a load in either direction. These circuits are often used in robotics and other applications to allow DC motors to run forward or backwards. H bridges are available as integrated circuits. They can be built using discrete components.
Two motors are used to form a robot prototype. The control signals from the H-bridge circuit are sent to the motors. Depending on the action performed, the control signals will cause the motor to run in either in clockwise, anticlockwise direction or stop.
Here for this project an Atmel series (AT89S52) microcontroller has been chosen, and we doing code using embedded C. The programming language is most widely used in embedded system because it is portable and structured programming language. By writing code in c language we can obtain accurate real-time output. ZigBee is one of the most widely used protocols for the wireless control of chair. In this project we are displaying the efficient use of the microcontroller and the ZigBee protocol.
Here we are using Mind wave sensor [4] to detect the bio signals of human being .Here we are using microcontroller kit for control the robot .As per the requirement of human being the bio signals will be detected by the mind wave sensor and the signal to the chair motor and control them like clockwise and anticlockwise. This process will be done automatically as per the requirement of the user.
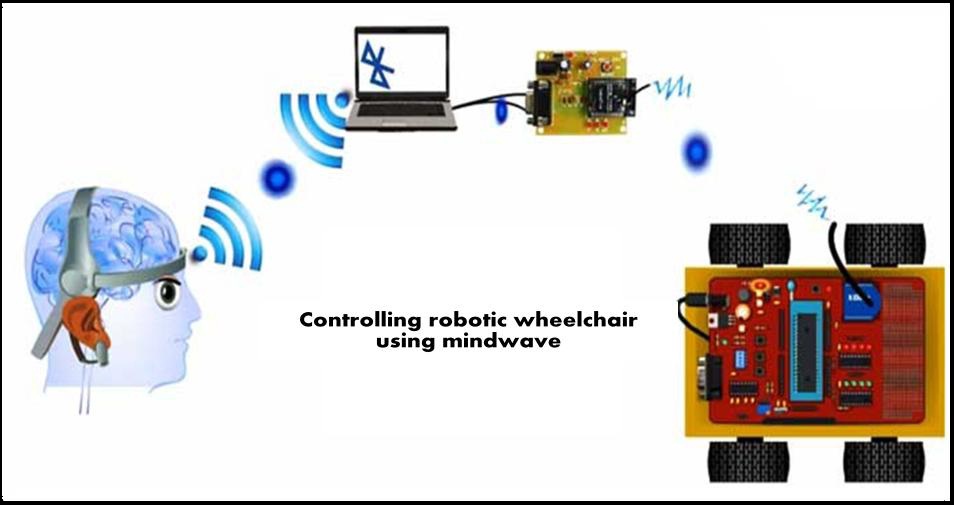
Fig: Block diagram representing BCI controlled wheelchair prototype
Various analyses were made on different subjects to analyse the states of the brain.

The neural activity in brain is recorded using non-invasive techniques (Mindwave sensor). Here we use a single electrode so it will be easy to use. It will provide better alternatives for individuals to interact with their environment in an efficient way. This project will help the physically challenged to lead an independent life with the help of their brain signals.
The work presented in this can be extended in several directions. Here several research directions are presented which might be followed for further applications. The possible improvements that can be brought to the used method are as follows: Since the application of wavelet transformation in electro cardiology is relatively new field of research, many methodological aspects (Choice of the mother wavelet, values of the scale parameters) of the wavelet technique will require extra analysis in order to improve the clinical usefulness of this novel signal processing system. Simultaneously, diagnostic and prognostic importance of wavelet techniques in various fields of electro cardiology needs to be recognized in large clinical studies. Moreover the work can be further improved by developing disease diagnostic clinical applications with the assistance of this denoising and compression schemes for EEG and EMG signals.
Brain-Computer Interface (BCI) is a method of communication based on voluntary neural activity generated by the brain and independent of its normal output pathways of peripheral nerves and muscles. The neural activity used in BCI is recorded using noninvasive techniques (Mindwave sensor). The BCI will provide better alternatives for individuals to interact with their environment in an efficient way. Thus enabling the control of robotic wheel chair by using EEG.
1. K. R. Müller and B. Blankertz, “Toward non-invasive brain-computer interfaces,” IEEE Signal Processing Magazine, vol. 128, no. 1, pp. 125-128, 2006.
2. J. J. Szafir, “Non-Invasive BCI through EEG: An Exploration of the Utilization of Electroencephalography to Create Thought-Based Brain-Computer Interfaces,” Boston College.2010
3. Humaira Nisar, Vooi Voon Yap, Kim Ho Yeap, Aamir Saeed Malik,“Analysis of Electroencephalogram signals generated from eye movements”, Australasian Physical and Engineering Sciences in Medicine, Accepted, December, 2012.
4. Nikhil R. Folane and R. M. Autee worked on design of EEG Based Brain Controlled Wheelchair for Physically Challenged People and published in IJIRCCE, Volume 4, Issue 1, January-2016
