


Updated on May 29, 2026
Automatic guided vehicle or mobile robots is an intelligent machine that has intelligence to determine its motion starts according to the environment conditions. For an AGV to operate it must sense its environment be able to plan its operations and then act based on this plan.
The running environment could be varied such as the path orientation, road flatness, obstacle position, road surface friction etc. There are great many uncertainties of what condition will emerge during its operation. Thus a new control method other than the conventional control method is demanded to manage the response of the whole system.
In the last years, fuzzy logic has been applied mobile robot and autonomous vehicle control significantly. The best arguments supporting fuzzy control are the ability to cope with imprecise information in heuristic rule based knowledge and sensor measurements.
Fuzzy logic can help design robust individual behaviors units. Fuzzy logic controllers incorporate heuristic control knowledge. It is convenient choice when a precise linear model of the system to be controlled cannot be easily found. Another advantage of fuzzy logic control is to use fuzzy logic for representing uncertainties, such as vagueness or imprecision which cannot be solved by probability theory. Also fuzzy logic offers greater flexibility to user, among which we can choose the one that best, fits the type of combination to be performed.
Fuzzy logic is another class of AI, but its history and applications are more recent than those of the expert systems (ES). According to George Boole, human thinking and decisions are based on "Yes / No" reasoning or "1 / 0 " logic. According to Boolean logic developed and expert system principles were formatted based on Boolean logic. It has been argued that human thinking does not always follow crisp "Yes / No " logic, but is often vague, quantitative, uncertain, imprecise or fuzzy in nature.
For example in terms of " Yes / No " logic, a thinking rule may be
" If it is not raining AND outside temperature is less than 80 F ,THEN take a sight seeing trip for more than 100 miles"
In actual thinking it might be
\ "IF weather is good AND outside temperature is mild THEN take a long sight seeing trip".
Based on the nature of human thinking, Lotfi Zadeh, a computer scientist at the university of California, Berkeley, originated "The Fuzzy Logic" or "Fuzzy Set Theory" in 1965. In the beginning, he was highly criticized by professional community, but gradually this emerged as an entirely new discipline of AI. The general methodology of reasoning in fuzzy logic and expert system by "IF.. THEN…" statements or rules are the same, therefore it is often called "Fuzzy Expert System "
A fuzzy logic can help to supplement an ES and it is sometime hybrid with the latter to solve complex problems. Fuzzy logic has been successfully applied in process control, modeling, estimation, identification diagnostics, military science, stock market prediction etc.
A block diagram of a fuzzy control system is shown in figure.
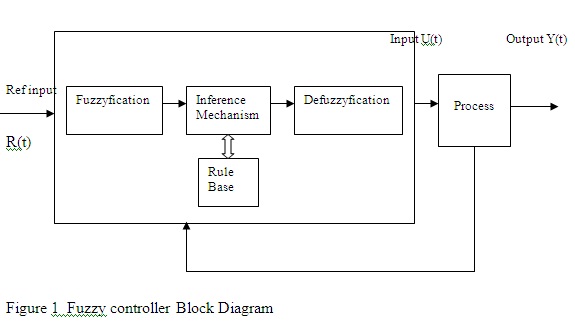
The fuzzy controller is composed of the following four elements.
1. A Rule base
2. An inference mechanism
3. A fuzzyfication interface
4. A defuzzyfication interface
A Rule base is a set of IF-THEN rules , which contains a fuzzy logic quantification of the expert’s liquistic description of how to achieve good control.
An inference mechanism , which emulates the expert’s decision making in interpreting and applying knowledge about how best to control the plant.
A fuzzyfication interface ,which converts controller inputs into information that the inference mechanics can easily use to activate and apply rules.
A defuzzyfication interface ,which converts the conclusions of the inference mechanism into actual inputs for the process.
Object detection and recognition
What / Who is that ?
Obstacle avoidance and homing.
How do I move safely ?
Interacting with objects and environment
How do I change that ?
Mapping and localization
Where am I ?
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
