


Updated on May 29, 2026
The driving is art, elegance and ethics. The human acts as the key element in this process and the weakest link in the same time, where 90% of traffic accidents are caused by human error and carelessness. Every year many accidents are reported due to high speed and wrong decision. A logical principle is that each 1% increase in velocity will result in a 4% potential increase in the risk of the fatal collision and an actual increase of 3% in the risk of a serious collision.
Modern day cars represent a symbiosis of several electronic subsystems that collaboratively give a safe and sound driving experience. One of the car development technologies takes the form of the Advanced Driver Assistant System development (ADAS). It is a system that necessary to monitor various parameters associated with the vehicle, vehicle surroundings to detect potentially dangerous situations at an early stage. Sensors with sophisticated devices, which are known as Sensor Network (SN), were included already in many cars nowadays to achieve (ADAS) technologies. A well-known ADAS is an Adaptive Speed Control system (ASC), Automatic Brake System (ABS), Warning Collision System (WCS) and Legal Restriction System to avoid high-speed dangerous. In addition, Lane Keeping System (LKS) and Lane Change System (LCS).
Index Terms — adaptive cruise control, automotive navigation system, driver drowsiness, electronic stability control, intersection assistant, steering wheel movement
Advanced Driver Assistance Systems, commonly called ADAS, are the systems to help the driver in the driving process. When designed with a safe and appropriate Human-Machine Interface, they should increase the safety of car and more generally the road safety. Advanced driver assistance systems (ADAS) are technologies that provide a driver with needed information, automate difficult and repetitive tasks, and lead to the overall increase in safety of the car for. Some of these technologies have proven to an improved driving experience and better overall road safety.
GPS navigation, taking an example, has become increasingly the most common in OEM infotainment systems since first being introduced in the 1990s. However, a lot more of ADAS are right on the cutting edge of the emerging automotive technologies. Some of these systems will have staying power to stick around, and you can expect to see at least a few of them in future car. Others may disappear or be replaced by better implementations and modernization of the same basic idea. Since ADAS rely on electronics and mostly include firmware elements, the development of these cutting edge systems is governed by the international safety standards such as IEC-61508 and ISO26262.
Autonomous cruise control (ACC; also called as adaptive cruise control or radar cruise control) is an cruise control system for various road vehicles that will automatically adjusts the speed of our vehicle to maintain a safe distance from vehicles ahead. There are basically two types of systems through we can attain the adaptive cruise control, those are, laser based systems and radar based systems.
Laser based system uses light pulses whereas Radar based system uses radio waves to develop a communication between the vehicles. The radar based system is preferred over laser based system because the in adverse weather conditions such as fog and if at all the front vehicle whose speed has to be tracked is covered with dust then laser based system will show no use. Thus based on the speed of the front vehicle our vehicle slows down when the distance between two vehicles is less and accelerates to the preset value when there is a considerable amount of distance between the vehicles

As we know today people are using the global positioning system commonly called GPS system to know the address of the locations they need to travel. This GPS system can be modified and implement inside the dashboard of the car to obtain the real time traffic information. The traffic information comes from a variety of sources such as traffic data providers, transportation department, police and even emergency services, road sensors, traffic cameras, and also aircraft reports. This information is made to be compiled and delivered through radio frequency (FM/HD Radio or satellite) to our navigation system embedded inside the car.
In the terrestrial FM applications, the traffic signals are broadcasted over the FM Radio Data System (RDS), which is a special application of the radio band for sending small amounts of digital information. Most of the car stereos support FM radio signals, which is how you can see radio station call letters or other artist and various songs title information on your display when tuned to certain amount of radio stations.
The major primary benefit is the time. Most of the times, it gives real time traffic information on your way, or if any other construction of buildings happening in your way. Thus the system gives time to change the route so that we can avoid much amount of wastage of time and utilize this time for other works. And this means less time spent sitting in the gridlock.

Driver Drowsiness Detection Driver drowsiness detection is one of the car safety technologies which helps prevent accidents caused by the driver getting drowsy. Various studies have also suggested that around 20% of the road accidents happening are fatigue-related, up to 50% on certain amount of roads. Some of the current systems learn driver patterns and can detect when a driver is becoming drowsy.
Various technologies may be used to try to detect driver drowsiness.
Primarily uses the steering input from electric power steering system.
It uses the lane monitoring camera.
It requires one of the cameras watching the driver's face.
It requires body sensors for measurement of parameters like brain activity, heart rate, skin conductance, muscle activity
Steering Wheel Movement (SWM) is measured using the steering angle sensor and it is one of the widely used vehicle-based measures for detecting the level of drowsiness of the driver. Using an angle sensor which is mounted on the steering column, the driver’s steering behavior will be measured. When drowsy, the number of micro-corrections on the steering wheel normally reduces compared to normal driving because of drowsiness. Furlough and Graham observed that sleep deprived drivers made fewer steering wheel reversals than the normal drivers .
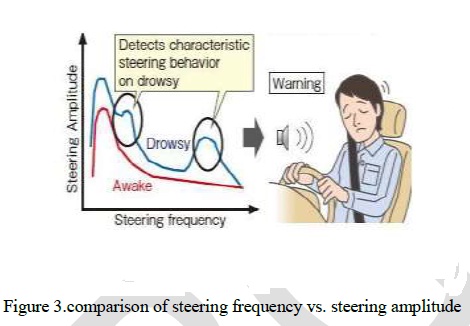
To eliminate effect of lane changes, the researchers considered only small amount of steering wheel movements i.e., between 0.5° and 5°,which are needed to adjust lateral position within the lane . Fig below shows the SWM based detection. In general, steering behavior is influenced by the characteristics of driving task (e.g. speed, curvature, and lane width), even driver traits (e.g. driving experience), and driver states (e.g. laxness, distraction or fatigue). Drivers will be constantly judging the situation ahead and applying small, smooth, steering adjustments to correct for the small road bumps and crosswinds by turning the steering wheel in small increments
Electronic stability control (ESC), even referred to as electronic stability program (ESP) or dynamic stability control (DSC), is one of the computerized technology that improves a stability of vehicle by detecting and reducing loss of traction, even called as skidding. When ESC senses loss of steering control, it automatically applies the brakes to control "steer" of the vehicle where the driver intends to go. Braking will be automatically applied to wheels individually, such as the outer front wheel to achieve over steer or the inner rear wheel to undergo under steer. Some ESC systems also tend to reduce engine power until control is regained. ESC will not improve a vehicle's cornering performance; instead, it helps to minimize the loss of control of vehicle. One-third of major accidents could be prevented by the use of this technology.
During normal driving the ESC tends to work in the background and continuously monitor steering and vehicle’s direction. It compares the driver's intended direction which is determined through the measurement of steering wheel angle to the vehicle's actual direction which is determined through measured lateral acceleration, vehicle rotation, and the individual road wheel speeds. ESC interrupts only when it detects a probable loss of control in steering, i.e. when the vehicle is not going where the driver intended to steer.For example, when skidding during the emergency evasive swerves, under steer or over steer during wrongly judged turns on slippery roads, or even hydroplaning.
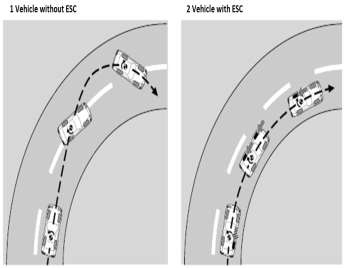
ESC may also interrupt in an unwanted way during high-performance driving, because input of steering may not be always directly indicative of the intended direction of travel that is called controlled drifting. ESC estimates direction of the skid, and then applies brakes to the individual wheels asymmetrically in order to create torque about the vertical axis of the vehicle, opposing the skid and bringing the vehicle back to track with the driver's provided direction. Additionally, the system may even reduce engine power or operate the transmission to slow the vehicle down.
ESC can work on any of the surface, from dry pavement to even frozen lakes. It reacts to this and corrects skidding at much faster rate and more effectively the typical can human driver, often before the driver is even aware of imminent loss of control. In fact it led to some concern that ESC could allow drivers to become more confident in their own vehicle's handling and their driving skills. For this reason the ESC systems typically informs the driver when they interrupt, so that the driver knows that the handling of vehicle limits have been approached. Most of times it activates the dashboard indicator light and(or) even alert tone; sometimes it intentionally allow the vehicle's corrected course to deviate very slightly from the driver intended direction, even if it is possible to precisely match it.
A driver’s miscalculation or misconception of speed and distance or failure to stop at signals during red lights or are some of common causes of accidents at intersections. The intersection assistant system identifies this type of critical situation at intersections and alerts the driver of red light infringements or hazardous turnoff situations. The system can even recommend the needed speed for a green traffic light wave or when approaching the red traffic light. At the crossroads, the intersection assistant system supports the driver by establishing a direct communication between the vehicle and traffic signals. Various camera systems are installed at the intersection that monitors the traffic situation and send this obtained information together with the signal to the vehicle through wireless technology.
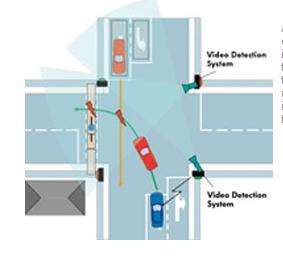
The system evaluates the data received via wireless technology together with onboard information present from the vehicle such as speed, distance from the intersection and even direction of movement. Appropriate traffic infrastructure equipment and various links between the infrastructure and also the vehicle communication technology offer potential for improvising traffic safety further. The driver always holds responsibility for the vehicle and will be offered support in hazardous situations from the intersection assistant system
The strength of ADA systems is great, provided ADAS is completely accepted and widely introduced in the future. The ADA systems will all have to be made as fail-safe as possible. Whenever the system fails to succeed, safety is to be determined by the provisions taken to avoid major accidents and in case of any accident the measures to minimize the consequences for passengers. Acceptability from customers of ADAS is highly dependent upon solid demonstration of these many features. Acceptability is also found to be most dependent of the form in which ADAS applications are implemented. For the end-user or customer the benefits should be clear and preferably directly noticeable. For this reason comfort enhancing features need a better changeover than safety enhancement properties. Most drivers consider themselves as at least better drivers with respect to safe behavior than average driver. Strict requirements for ADAS applications by all stakeholders are safe (and valid) operation and also reliability, false alarms are not all acceptable for end-users particularly
[1] “An Intelligent Driver Assistance System (I-DAS) for Vehicle Safety Modelling using Ontology Approach” Saravanan Kannan, Arunkumar Thangavelu, Ramesh abu Kalivaradhan School of Computing Sciences and Engineering, VIT University, 632014, TN, India
[2] ―Increasing complexity of driving situations and its impact on an ADAS for anticipatory assistance for the reduction of fuel consumption” Christoph Rommerskirchen; Magnus Helmbrecht; Klaus Bengler Intelligent Vehicles Symposium (IV),2013 IEEE
[3] “ADVANCED DRIVER ASSISTANCE SYSTEMS - PAST, PRESENT AND FUTURE” COMPUTER ENGINEERING CONFERENCE (ICENCO), 2011 SEVENTH INTERNATIOAL , ISSUE DATE: DEC. 2011 , WRITTEN BY: SHAOUT, ADNAN; COLELLA, DOMINIC; AWAD, S.
[4] “Vehicle safety regulations and ADAS: tensions between law and technology” K.A.P.C van wees, system ,Man , a. cybernetics 2004 IEEE international conference
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
