


Updated on May 29, 2026
Gesture recognition is a topic in computer science and language technology with the goal of interpreting human gestures via mathematical algorithms. Gestures can originate from any bodily motion or state but commonly originate from the face or hand.
Current focuses in the field include emotion recognition from the face and hand gesture recognition. Many approaches have been made using cameras and computer vision algorithms to interpret sign language. However, the identification and recognition of posture, gait, proxemics, and human behaviors is also the subject of gesture recognition techniques. Gesture recognition can be seen as a way for computers to begin to understand human body language, thus building a richer bridge between machines and humans than primitive text user interfaces or even GUIs (graphical user interfaces), which still limit the majority of input to keyboard and mouse.
Gesture recognition is a topic in computer science and language technology with the goal of interpreting human gestures via mathematical algorithms. Gestures can originate from any bodily motion or state but commonly originate from the face or hand. Current focuses in the field include emotion recognition from the face and hand gesture recognition. Many approaches have been made using cameras and computer vision algorithms to interpret sign language. However, the identification and recognition of posture, gait, proxemics, and human behaviors is also the subject of gesture recognition techniques. Gesture recognition can be seen as a way for computers to begin to understand human body language, thus building a richer bridge between machines and humans than primitive text user interfaces or even GUIs (graphical user interfaces), which still limit the majority of input to keyboard and mouse.
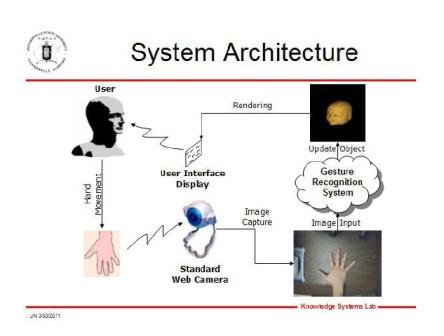
Interface with computers using gestures of the human body, typically hand movements. In gesture recognition technology, a camera reads the movements of the human body and communicates the data to a computer that uses the gestures as input to control devices or applications. For example, a person clapping his hands together in front of a camera can produce the sound of cymbals being crashed together when the gesture is fed through a computer. One way gesture recognition is being used is to help the physically impaired to interact with computers, such as interpreting sign language.
The technology also has the potential to change the way users interact with computers by eliminating input devices such as joysticks, mice andkeyboards and allowing the unencumbered body to give signals to the computer through gestures such as finger pointing. Unlike haptic interfaces, gesture recognition does not require the user to wear any special equipment or attach any devices to the body. The gestures of the body are read by a camera instead of sensors attached to a device such as adata glove.
In addition to hand and body movement, gesture recognition technology also can be used to read facial and speech expressions (i.e., lip reading), and eye movements. The literature includes ongoing work in the computer vision field on capturing gestures or more general human pose and movements by cameras connected to a computer.
The gestural equivalent of direct manipulation interfaces is those which use gesture alone. These can range from interfaces that recognize a few symbolic gestures to those that implement fully fledged sign language interpretation. Similarly interfaces may recognize static hand poses, or dynamic hand motion, or a combination of both. In all cases each gesture has an unambiguous semantic meaning associated with it that can be used in the interface. In this section we will first briefly review the technology used to capture gesture input, then describe examples from symbolic and sign language recognition. Finally we summarize the lessons learned from these interfaces and provide some recommendations for designing gesture only applications.
Gesture-only interfaces with syntax of many gestures typically require precise hand pose tracking. A common technique is to instrument the hand with a glove which is equipped with a number of sensors which provide information about hand position, orientation, and flex of the fingers. The first commercially available hand tracker, the Data glove, is described in Zimmerman, Lanier, Blanchard, Bryson and Harvill (1987), and illustrated in the video by Zacharey, G. (1987). This uses thin fiber optic cables running down the back of each hand, each with a small crack in it. Light is shone down the cable so when the fingers are bent light leaks out through the cracks.
Measuring light loss gives an accurate reading of hand pose. The Dataglove could measure each joint bend to an accuracy of 5 to 10 degrees (Wise et. al. 1990), but not the sideways movement of the fingers (finger abduction). However, the CyberGlove developed by Kramer (Kramer 89) uses strain gauges placed between the fingers to measure abduction as well as more accurate bend sensing (Figure XX). Since the development of the Dataglove and Cyberglove many other gloves based input devices have appeared as described by Sturman and Zeltzer (1994).

The CyberGlove captures the position and movement of the fingers and wrist. It has up to 22 sensors, including three bend sensors (including the distal joints) on each finger, four abduction sensors, plus sensors measuring thumb crossover, palm arch, wrist flexion and wrist abduction. Once hand pose data has been captured by the gloves, gestures can be recognized using a number of different techniques. Neural network approaches or statistical template matching is commonly used to identify static hand poses, often achieving accuracy rates of better than 95%
Time dependent neural networks may also be used for dynamic gesture recognition, although a more common approach is to use Hidden Markov Models. With this technique Kobayashi is able to achieve an accuracy of XX% , similar results have been reported by XXXX and XXXX. Hidden Markov Models may also be used to interactively segment out glove input into individual gestures for recognition and perform online learning of new gestures (Lee 1996). In these cases gestures are typically recognized using pre-trained templates; however gloves can also be used to identify natural or untrained gestures. Wexelblat uses a top down and bottom up approach to recognize natural gestural features such as finger curvature and hand orientation, and temporal integration to produce frames describing complete gestures . These frames can then be passed to higher level functions for further interpretation.
Although instrumented gloves provide very accurate results they are expensive and encumbering. Computer vision techniques can also be used for gesture recognition overcoming some of these limitations. A good review of vision based gesture recognition is provided by Palovic et. al. . In general, vision based systems are more natural to use that glove interfaces, and are capable of excellent hand and body tracking, but do not provide the same accuracy in pose determination. However for many applications this may not be important.
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
