


Published on Nov 30, 2023
The main idea behind the robotic arm is that it imitates the actions of a human arm or hand. It is a programmable Robotic Manipulator. This type of robot is often termed, Anthropomorphic because of the similarities between its structure and the human arm.
The AT89C51 microcontroller is used as the main part of the design The AT89C51 is a low-power, high-performance CMOS 8-bit microcomputer with 4K bytes of Flash programmable and erasable read only memory (PEROM). Atmel AT89C51 is a power full, highly flexible and cost effective solution to many embedded control applications.
The purpose of this project is to design and develop such an interface to provide control over a robotic arm from a remote location in a simulated environment applicable to real-world scenarios. The interface will include a video feed broadcasted from the remote location and shall allow users to accurately position the arm to points within the robot’s reach in order to manipulate objects or perform simple tasks.
First, the robot’s spatial reach was mapped in order to determine the minimum and maximum range of motion for any given height. Second, an algorithm was written to interpret multiple servo rotations to given spatial coordinates. Third, these coordinates were scaled for the user interface in order to provide a visual map for plotting destinations. Lastly, the user interface over the robot was simplified so that multiple servo rotations may occur in one set of mouse commands.
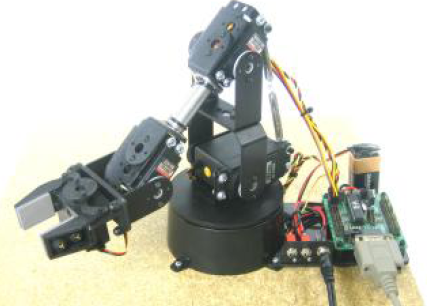
The project objective is to develop an application that provides remote control of an AL5A robotic arm connected to a low-powered, small CPU embedded system, called an eBox. The program communicates via a client/server application involving TCP protocol. The eBox acts as a server and receives servo transmissions from the client to control the robotic arm while transmitting video back.
It have the capacity to dramatically improve product quality .Robots increase workplace safety. Workers are moved to supervisory roles, so they no longer have to perform dangerous applications in hazardous settings. It have the ability to work at a constant speed without pausing for breaks, sleep, vacations, they have the potential to produce more than a human worker. Greater worker safety leads to financial savings . Their movements are always exact, so less material is wasted
