


Published on Jan 09, 2026
The role of the ABS is to control the wheel speed in order to prevent the wheels from locking and to assure a maximum braking force. This is of major importance when the runway is slippery or very short.
Wheel moment of inertia, Rotational wheel speed, Friction coefficient, Wheel Radius Normal force per wheel Friction force, Aircraft speed Figure 1b: are analogous to the above vehicle wheel shown. Forces acting on a braked wheel are shown in fig1b.The ABS commands the brake pressure as a function of the difference between the measured and the reference wheel speed.
The latter is calculated from the measured aircraft speed and the desired wheel slips, using equation. At the moment, when the pilot pushes the brake pedal the brake pressure and the wheel slip increase provoking a ground force between tyre and runway. Assuming the case of full braking, the ABS will control the wheel speed to its reference value. To achieve a maximum braking force the reference slip should be chosen close to the optimum slip. However, when the pressure level in the brakes becomes too high, the wheel slip slides beyond the optimum of the adhesion curve and the system tyre/runway becomes instable.
The slope of u (s) being negative, the wheel immediately starts to lock. In this case, the ABS rapidly releases the brake pressure to force the wheel speed back to the stable side of the adhesion curve. In fact, this situation occurs, when either the desired slip s, has been chosen on the instable side of the friction characteristic, or when a sudden change in ground force is encountered (e.g. a transition from a dry to a wet runway surface).
The principle problem in ABS design is that the optimum slip and the exact shape of the adhesion characteristic depend on the runway surface and further parameters, which cannot be measured, such as the condition of the tyres or the dynamics of the normal forces. Bearing in mind that the optimum slip value may vary between 3% and 20%, it is clear that the choice of the reference slip value is crucial for a safe and efficient ABS. If it is too small the braking force might become insufficient, if it is too high, wheel lockup occurs.
Recently there has been a growing interest in intelligent control techniques for the design of aircraft and road vehicle Antilock Brake Systems (ABS). In particular, rule-based, fuzzy logic controllers have been applied to this problem and successfully tested in simulation. In fact, the use of non-linear, fuzzy control techniques appears to be particularly appropriate for the ABS control problem because of the high non-linearity of the system and the lack of a precise physical model of the friction force between tyre and runway.
In addition to that, the controller must operate at an unstable equilibrium point to achieve an optimal braking performance. The most important problem in ABS control design - fuzzy or conventional - is that the optimum adhesion coefficient varies significantly with the surface condition (i.e. dry, wet, icy, etc.) of the runway. Because the latter is unknown, it is extremely difficult to define a controller that guaranties an optimal braking performance for all types of runway conditions.
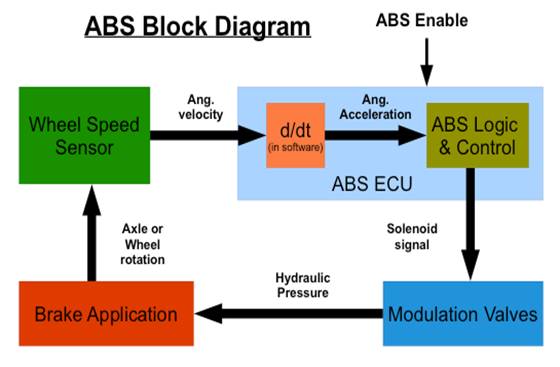
A typical ABS includes a central electronic control unit (ECU), four wheel speed sensors, and at least two hydraulic valves within the brake hydraulics. The ECU constantly monitors the rotational speed of each wheel; if it detects a wheel rotating significantly slower than the others, a condition indicative of impending wheel lock, it actuates the valves to reduce hydraulic pressure to the brake at the affected wheel, thus reducing the braking force on that wheel.
The wheel then turns faster. Conversely, if the ECU detects a wheel turning significantly faster than the others, brake hydraulic pressure to the wheel is increased so the braking force is reapplied, slowing down the wheel. This process is repeated continuously and can be detected by the driver via brake pedal pulsation. Some anti-lock system can apply or release braking pressure 16 times per second.
The ECU is programmed to disregard differences in wheel rotative speed below a critical threshold, because when the car is turning, the two wheels towards the centre of the curve turn slower than the outer two. For this same reason, a differential is used in virtually all roadgoing vehicles.
If a fault develops in any part of the ABS, a warning light will usually be illuminated on the vehicle instrument panel, and the ABS will be disabled until the fault is rectified.
The modern ABS applies individual brake pressure to all four wheels through a control system of hub-mounted sensors and a dedicated micro-controller. ABS is offered or comes standard on most road vehicles produced today and is the foundation for ESC systems, which are rapidly increasing in popularity due to the vast reduction in price of vehicle electronics over the years.
Modern electronic stability control (ESC or ESP) systems are an evolution of the ABS concept. Here, a minimum of two additional sensors are added to help the system work: these are a steering wheel angle sensor, and a gyroscopic sensor. The theory of operation is simple: when the gyroscopic sensor detects that the direction taken by the car does not coincide with what the steering wheel sensor reports, the ESC software will brake the necessary individual wheel(s) (up to three with the most sophisticated systems), so that the vehicle goes the way the driver intends. The steering wheel sensor also helps in the operation of Cornering Brake Control (CBC), since this will tell the ABS that wheels on the inside of the curve should brake more than wheels on the outside, and by how much.
The ABS equipment may also be used to implement a traction control system(TCS) on acceleration of the vehicle. If, when accelerating, the tire loses traction, the ABS controller can detect the situation and take suitable action so that traction is regained. More sophisticated versions of this can also control throttle levels and brakes simultaneously
There are four main components to an ABS: speed sensors, valves, a pump, and a controller.
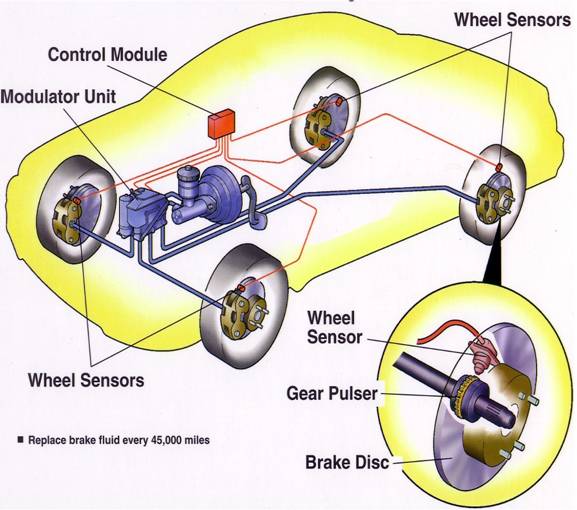
These sensors use a magnet and a coil of wire to generate a signal. The rotation of the wheel or differential induces a magnetic field around the sensor. The fluctuations of this magnetic field generate a voltage into the sensor. A schematic of this system is shown in figure below. The ABS controller interprets this signal.
Since the voltage inducted on the sensor is a result of the rotating wheel, this sensor can become inaccurate at slow speeds. The slower rotation of the wheel can cause inaccurate fluctuations in the magnetic field and thus cause inaccurate readings to the controller.
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
