


Published on Apr 02, 2024
This paper provides an overview of Energy Kites, a revolutionary technique of power generation. With growing technological innovations & carbon footprints, energy at a cheaper rate with negligible green house effect have become vital. Leading energy companies are showing great concern to this idea of energy generation & hence a revolution has set out for a breakthrough technological solution for this problem.
Out of all innovative ideas one major idea that's gaining great attention is Airborne wind energy.Replacing the traditional structure of wind turbine by Kites tethered to ground is the main idea behind Airborne wind energy.
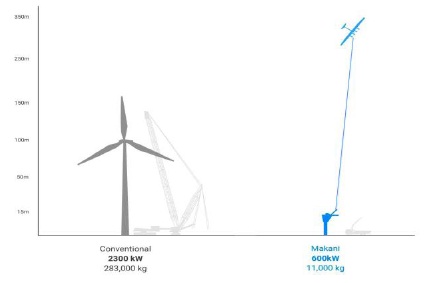
Airborne wind technology gives a power output of 600 KW with wind speed of 11.5m/sec which can be increased significantly by achieving great altitudes unliketraditional structures that are limited to height of few meters.Also due to absence of bulky tower & huge blades,energy Kite offers much more mass to power ratio. This energy generation gives a promising power output from wind making complete use of air velocity at an comparatively higher altitude. Google has nearly invested $15 million in the Makani power for airborne wind energy.
In this Airborne technology the whole design of a traditional wind turbine is replaced by Energy Kite which traces the path of tip of a turbine eliminating 90% of weight as shown in fig.1. The Kites are installed with turbines or DC motors on the board that generate energy by taking advantage of the circular trajectory. When a Kite is flying at a great velocity in cross wind direction, the tension in the lines increases significantly. So Kite is tethered to ground station by a strong carbon fibre. The power generated by energy Kite on board while in its circular trajectory is transmitted to ground at the same time via a high voltage wire inserted inside tethering material to ground station.
This system reduces the need of gear box hence reducing the complexity & weight of the system. Due to generation of electricity by the motors on the Kite board while in trajectory, energy Kites are also called as on-board power generator. Available wind energy density at an altitude of 400 meters is nearly in order of two in magnitude as compared to those on the ground which have an average turbine height of 50 meters. Hence the height at which Energy Kites fly, the magnitude of wind velocities increases remarkably as compared to the traditional wind turbine
The idea of power generation using tethered Kites in cross wind direction was first investigated by an American engineer Miles Loydin in 1970’s & 1980’s (Diehl 2013),(Loyd 1980). He suggested two methods which he termed as lift mode & drag mode for power generation. The motivation behind Airborne wind turbines is the fact that only 30% of the outer part of turbine blades of traditional air turbine contributes to nearly half of the total power generation, whereas these parts are much lighter as compared to inner parts of the turbine. When a paper Kite flies in crosswind direction unlike that of a plane wind, it starts rotating in circular path similarly when a huge Kite tethered to ground flies in a crosswind direction after achieving certain altitude this Kite also obtains a circular trajectory. This trajectory is used for power generation either by using the tension in tethered rope called as lift mode or by using motors on the Kite called as drag mode. Kite used in drag mode is called as Energy Kite.
Energy Kite system consist of three main components
Energy Kite
Tether
Ground Station
Flying an Energy Kite in crosswind direction is a complex control task that requires a sophisticated technology to sustain a stable orbit. Hence a computer system assisted by GPS and other sensors along with thousands of real-time calculations are required to guide the Kite to the flight path & sustain in the strongest winds for maximum energy generation.
Kite is the main component of entire Airborne on-board power generation system as it consists of small turbines mounted on it that generate power right on the flight by using the velocity of wind at high altitude & directly sends it to the ground. Kite construction consists of crucial design along with selection of material that is light as well as strong. To achieve more efficient power generation, a Kite is mounted with more than one rotor. The main objective behind installing maximum number of rotors on the Kite is to get maximum power generation as increase in rotor increases power output significantly. Makani powers in California uses a Kite with 8 rotors that effectively generates a power of 600 KW at a wind speed of 11.5m/sec as shown in fig 2.
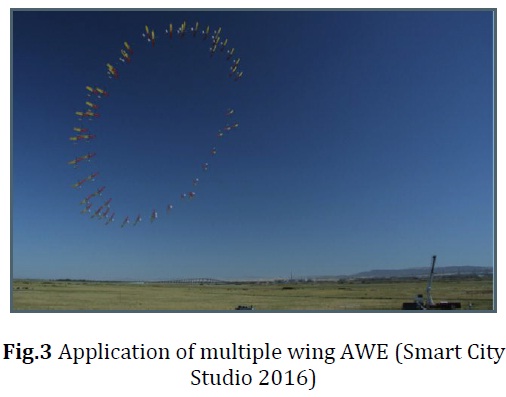
Theoretically, a modern wing with a lift of coefficient of lift 0.03 and a wind velocity of VW=13 m/s would lead to a power output of 217 KW per square meter of area (Diehl 2013). Kite design consist of various challenges like the rigidity of the material to sustain various types of forces acting on it, as the Kite rotates at a very high speed. The main force that the Kite has to withstand is the drag force. As the tether distance increases the drag force on the Kite increases too. As the drag force increases, power generation rate also increases whereas if this exceeds a limit may lead to minor instability of the system. However if such conditions exceeds their threshold then it cannot be controlled from ground station. To overcome the problem of long length of tethering & get efficient power generation at short tethering distance, multiple Kites are used as in fig 3. This concept indeed leads to significant reduction in tether drag loss as compared to a single wing system
A tether is made of conductive wires surrounded by a high strength covering. The tether in case of energy Kites serves two purposes; firstly it acts as a link for Kite to ground contact and secondly used to transmit energy generated by energy Kite to the ground station. Tether length is a crucial factor to be controlled for adjusting Kite rotation speed as well as drag acting on both the Kite as well as tether. A tether is preferably made of high strength composite fibre covering thick Aluminium wire which acts as a conductor to transfer energy from Kite to ground station.
The ground station holds the tether, and is used as a resting place for the energy Kite, when not in flight. The ground station occupies less ground space and is significantly smaller than traditional wind turbines. The ground station is directly posed to the forces acting on Kite. The ground station strength actually decides the length up to which the Kite can be tethered.
Power P that can be generated by the Energy Kite under idealised assumption can be approximately given by equation 1.
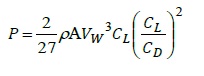
Where; A is the area of Kite wing , CL & CD are the lift & drag coefficient respectively & VW is the wind speed. A ratio of lift coefficient CL to that of drag coefficient CD is the drag ratio which is an important aspect with respect to power generation. Importance of drag ratio is clearly reflected in equation 1(Diehl 2013). Initially the Kite is taken to a considerable height by the on board rotors attached to the Kite, which are powered by electricity from the ground station. These rotors take Kite up to a suitable altitude where Kite gets into its circular trajectory in crosswind direction & faces high velocity winds. After this stage the same rotor generates energy when Kite gets into circular motion. Setting a Kite in it's perfect trajectory needs skilled operator on the ground station. The tether length is adjusted such that the drag pressure does not exceed the permissible capacity of force of ground station.
Tether length plays an important role in setting diameter of rotation of the Kite, as this significantly affects the power generation. As Kite depicts, the motion of the tip of a turbine blade of a traditional wind turbine plant hence it can be visualised by this view that at set diameter of rotation of conventional turbines the power generated is strictly based on the wind speed at that particular height. But with Energy Kite a whole new possibilities opens up, as we can vary the diameter & altitude in order to optimize power generation by minimum altitude. Also we can extract maximum power from the wind energy.
The total aerodynamic force that the Kite experiences is also accompanied by one more factor other than CL & CD, this factor is due to on board rotors of the Kite which generate energy. This coefficient is denoted by CD,power and might be used for usable power generation. Hence in case of energy Kite CR is abbreviated as aerodynamic force coefficient which is an important factor affecting power generation. While the Kite is following it's circular trajectory, it has to go through two losses: cosine loss & gravitational loss. Gravitational loss may be neglected at high wind speeds but the cosine loss is considerable at any given moment of flight.
Current best estimates for this technology, projects a life cycle cost of 0.5 to 1.5 cents per Kilowatt hour compared to traditional wind turbine which current costs 5 to 12 cents per kilowatt hour. Use of Energy Kites opens a new world of opportunities in the field of wind power generation by making complete use of air at high altitude too. If such technology is implemented on a large scale, the use of power plants that burn out conventional resources could be decreased to a great extent, thereby decreasing air pollution. With Energy Kites, when electric power will be available at cheaper rates, the day of electric cars is not much far. Use of this clean energy will decrease the rate of global warming significantly. If more Research is carried out in the field of Energy Kites, the power generation rate may also be increased to more than 40 KW/m2 of wing area.
Moritz,Diehl.2013.AirborneWindEnergy:Basic Concepts and Physical Foundations https://homes.esat.kuleuven.be/~highwind/wpcontent/uploads/2013/08/Diehl2013a.pdf
Loyd, M., 1980, Crosswind Kite Power, Journal of Energy, 4(3):106–111.
Mario, Zanon, Sebastien Gros, Johan Meyers and Moritz Diehl. 2012, Airborne Wind Energy Based on Dual Airfoils, In Proceedings of the 19th IFAC World Congress, 2014, 5814-5819
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
