


Published on Apr 02, 2024
All of us know that motor is a machine which produces or imparts motion, or in detail it is an arrangement of coils and magnets that converts electric energy into mechanical energy and ultrasonic motors are the next generation motors. In 1980,the world's first ultrasonic motor was invented which utilizes the piezoelectric effect in the ultrasonic frequency range to provide its motive force resulting in a motor with unusually good low speed, high torque and power to weight characteristics.
Electromagnetism has always been the driving force behind electric motor technology. But these motors suffer from many drawbacks. The field of ultrasonic seems to be changing that driving force.
Ultrasonic motor construction tends to be simpler than EM type motors. Fewer assembly parts mean fewer moving parts and consequently less wear. The number of components required to construct an USM is small thereby minimizing the number of potential failure points.
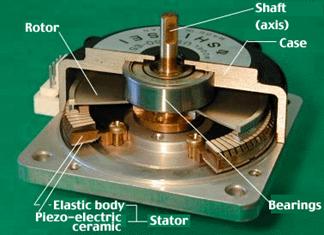
As the ultrasonic motor uses ultrasonic vibrations as its driving force,it comprises a stator which is a piezoceramic material with an elastic body attached to it,and a rotor to generate ultrasonic vibrations. It therefore does not use magnets or coils. Therefore there is no problem of magnetic field and interference as in the case of electric motors. In ultrasonic motors, piezoelectric effect is used and therefore generates little or no magnetic interference. Principle Of Operation
Many polymers, ceramics and molecules are permanently polarized; that is some parts of the molecules are positively charged, while other parts are negatively charged. When an electric field is applied to these materials, these polarized molecules will align themselves with the electric field, resulting in induced dipoles within the molecular or crystal structure of the material. Further more a permanently polarized material such as Quartz(SiO2) or Barium Titanate(BaTiO3) will produce an electric field when the material changes dimensions as a result of an imposed mechanical force. These materials are piezoelectric and this phenomenon is known as Piezoelectric effect. Conversely, an applied electric field can cause a piezoelectric material to change dimensions. This is known as Electrostriction or Reverse piezoelectric effect. Current ultrasonic motor design works from this principle, only in reverse.
When a voltage having a resonance frequency of more than 20KHz is applied to the piezoelectric element of an elastic body (a stator),the piezoelectric element expands and contracts. If voltage is applied, the material curls. The direction of the curl depends on the polarity of the applied voltage and the amount of curl is determined by how many volts are applied.
Eg:Quartz,Rochelle salt,Tourmaline,Lead Zirconium Titanate
t therefore does not make use of coils or magnets. It is a motor with a new concept that does not use magnetic force as its driving force. It also overcomes the principles of conventional motors. The working principle is based on a traveling wave as the driving force. The wave drives the comb of the piezoelectric ring. When applied, the piezoelectric combs will expand or contract corresponding to the traveling wave form and the rotor ring which is pressed against these combs start rotating.
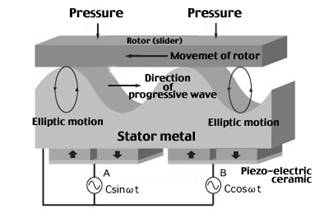
When a voltage having a resonance frequency of more than 20 KHz is applied to the piezoelectric element of an elastic body(a stator),the piezoelectric element expands and expands and contracts. The piezoelectric ring is divided into two groups of alternated polarities, which are driven simultaneously by cyclic signals that are ninety degrees out of phase, to produce a traveling wave of flexural vibrations. The third input lead is ground and attached to the ring itself. It acts as a common return to both the out of phase input leads.
A stator and a rotor (dynamic body) are coupled to form an ultrasonic motor. The dynamic body is pressed against the side of the stator metal surface which the piezoelectric ceramic is not glued on.Comb tooth grooves are created on this side. The rotor (dynamic body) is pressed tightly against this side of the stator metal surface so that they are adhered together closely. As the progressive wave travels and undulates through this contact surface, some areas of the surface of the rotor which is tightly adhered to the stator are contacted by the vertices of the wave and some areas are not. At this time, at the vertices of the progressive wave that contacts the rotor surface, an elliptic motion is generated.
The locus of the elliptic motion points to the opposite direction of the progressive wave traveling on the stator surface. At the same time, it has a vertical elliptic motion in contrast to the horizontal undulation of the progressive wave that travels on the stator surface. Reversing the polarity of the input power will reverse the direction of rotation.
The rotor and stator are pressed against each other with strong pressure to create tight adhesion. The progressive wave travels along the circumference of the stator while undulating. Only the vertexes of the progressive wave contact the rotor surface and an elliptic rotary motion is generated at each vertex. Affected by the elliptic rotary motion, the rotor is impelled to rotate. As the direction of the locus of the elliptic motion is opposite to the direction of the progressive wave, the rotor affected by it also rotates in the opposite direction of the progressive wave. When the progressive wave travels along the circumference of the stator clockwise (CW), a counterclockwise (CCW) elliptic rotary motion is generated at the vertex of the wave contacting the rotor surface. The rotor contacting the vertex is impelled by the CCW elliptic rotary motion and rotates CCW. This is the driving principle of the ultrasonic motor
Thus we can say that the general principle of operation of ultrasonic motors is to generate gross mechanical motion through the amplification and repetition of micro deformations of the active material.
There are two power transformations involved in the running of ultrasonic motors.
1. Electric energy is transformed into mechanical vibrational energy of the stator by converse piezoelectric effect.
2. Vibrational energy of the stator is transformed into continous moving energy of the rotor (moving part) due to frictional interaction between the stator and rotor.
1. Low speed
2. High torque
3. Large holding torque
4. Quick response
5. Super responsibility and controllability
6. Absence of magnetic action (composed of nonmagnetic materials)
7. Noiseless
8. Compact and lightweight (Absence of winding wires)
9. Simple construction
10. Absence of gear mechanism
11. Dust free
12. Applicable in vaccum
A large holding force or torque at rest, without power supply
A low AC voltage excitation
A large actuating force or torque at low speed
A silent, non magnetic behaviour
A short time response
A very good micro positioning capability
Ultra small size can be easily miniaturized.
Dust free
In order for the combined longitudinal vibration of longitudinal and torsional vibrations at the interface between stator (the vibrating body that produces ultrasonic elliptical motion) and rotor to efficiently propel the rotor, the longitudinal and torsional vibrations must exhibit simultaneous resonance drive. In other words, the longitudinal resonance frequency and the torsional resonance frequency must be made to match. This can be easily done under weak field conditions, but the torsional resonance frequency tends to become higher than the longitudinal resonance frequency when driven under the strong field conditions of actual motors. To make the longitudinal and torsional resonance frequencies match, the first requirement to make the rotor lighter.
This involves reducing the height of the rotor, but this change in shape reduces the rigidity of the rotor, which makes it difficult to produce high torque. It is also necessary to increase the friction force to an extreme degree, but this inevitably put excessive stress on the bearings which causes the bearings to wear out and shorten the life of the motor. It is difficult to obtain high torque from an ultrasonic motor if it is miniaturized beyond a certain point.
1. Lens actuator for automatic focusing of cameras.
2. Watch movements
3. Roll screen motor for automatic open close actions.
4. Positioning in satellite reception devices.
5. Actuators in strong magnetic field
6. Sonar
7. Air and fluid pumps
8. Robotics and microrobotics
9. Powered heat rests in luxury cars
10. Print heads in dot matrix printers
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
