


Updated on May 29, 2026
The objective of the work describe in this paper is to develop an artificial hand aimed at replicating the appearance and performance of the natural hand the ultimate goal of this research is to obtain a complete functional substitution of the natural hand.
This means that the artificial hand should be felt by the user as the part of his/her own body (extended physiological proprioception(EPP) ) and it should provide the user with the same functions of natural hand: tactile exploration, grasping , and manipulation ("cybernetic" prosthesis).
Commercially available prosthetic devices, as well as multifunctional hand designs have good (sometimes excellent) reliability and robustness, but their grasping capabilities can be improved. It has been demonstrated the methodologies and knowledge developed for robotic hands can be apologies and knowledge developed for robotic hands can be applied to the domain of prosthetics to augment final performance. The first significant example of an artificial hand designed according to a robotic approach is the Belgrade/USC Hand.
Afterwards, several robotic grippers and articulated hands have been developed, for example the Stanford/JPL hand and the Utah/MIT hand which have achieved excellent results. An accurate description and a comparative analysis of state of the art of artificial hands can be found in. These hands have achieved good performance in mimicking human capabilities, but they are complex devices requiring large controllers and their mass and size are not compatible with the strict requirements of prosthetic hands.
In fact, the artificial hands for prosthetics applications pose challenging specifications and problems, as is usually the case for devices to be used for functional replacement in clinical practice. These problems have forced the development of simple, robust, and reliable commercial prosthetic hands, as the Otto Brock Sensor Hand prostheses which is widely implanted and appreciated by users. The Otto Bock hand has only one degree of freedom(DOF), it can move the fingers at proportional speed from 15-130 mm/s and can generate grip force up to 100 N.
According to analysis of the state of art, the main problems to be solved in order to improve the performance of prosthetic hands are
1) lack of sensory information gives to the amputee;
2) lack of "natural" command interface;
3) limited grasping capabilities;
4) Unnatural movements of fingers during grasping.
In order to solve these problems, we are developing a biomechatronic hand, designed according to mechatronic concepts and intended to replicate as much as possible the architecture and the functional principles of the natural hand.
The first and second problems can be addressed by developing a "natural" interface between the peripheral nervous system (PNS) and the artificial device (i.e., a "natural" neural interface (NI) to record and stimulate the PNS in a selective way. The neural interface is the enabling technology for achieving ENG-based control of the prostheses, i.e., for providing the sensory connection between the artificial hand and the amputee. Sensory feedback can be restored by stimulating in an appropriate way user's afferent nerves after characterization of afferent PNS signals in response to mechanical and proprioceptive stimuli. The "biomechatronic" design process described above is illustrated in the scheme.
The main requirements to be considered since the very beginning of prosthetic hand design are the following: cosmetics, controllability, noiselessness, lightness, and low energy consumption. These requirements can be fulfilled by an integrated design approach aimed at embedding different functions within a housing closely replicating the shape, size and appearance of human hand. This approach can synthesized with the term: “biomechatronic” design.
The design goal of the biomechatronic hand is to improve to some extent one of the most important limitations of current prosthetic hands (no dexterity and no adaptability), while preserving the main advantages of such hands, that is lightness and simplicity. This objective has been pursued by using small actuators(two of each finger) instead of one single large actuator( as in most current prosthetic hands) And by designing a kinematics architecture able to provide better adaptation to object shape during grasping. It turns out that the use of “micro motors” allows to augment functionality in grasping objects by means of “human-like” compliant movements of fingers. This result addresses the very basic requirements of “cosmetic” appearance of the hand in static and dynamic conditions.
The biomechatronic hand has three fingers to provide a tripodgrasp: two identical fingers(index and middle fingers) and the thumb(see Fig.2)
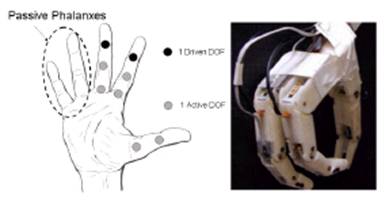
Fig. 2. Architecture of the biomechatronic hand
In fact, as explained in, at least three fingers (non rolling and non sliding contact) are necessary to completely restrain an object.
The hand performs two grasping tasks:
1) Cylindrical grasp
2) Tripod grasp
The finger actuation system is based on two microactuators which drive the meta carpophalengal (MP) and the proximal interphalengal (PIP) joint. The thumb actuation system is based on microactuators and has two active DOF’s at the MP and the interphalengeal (IP) joint, respectively.
The grasping task performed by the hand compromises two subsequent phases:
• Reaching and shape-adapting phase
• Grasping phase with thumb opposition.
In phase one ,the first actuator system allows the finger to adapt to the morphological characteristics of the grasped object. In phase two, the second actuator system provides thumb opposition for grasping.
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
