Published on Feb 14, 2025
Nanofog is a highly advanced nanotechnology, which the Technocratic Union has developed as the ultimate multi-purpose tool. It is a user-friendly, completely programmable collection of avogadro (6 x1023) numbers of nanomachines that can form a vast range of machinery, from wristwatches to spaceships.
It can simulate any material from gas, liquid, and solid, and it can even be used in sufficient quantities to implement the ultimate in virtual reality. ITx researchers suggest that more complex applications could include uploading human minds into planet-sized collections of Utility Fog. Active, polymorphic material, Utility Fog can be designed as a conglomeration of 100-micron robotic cells called foglets.
Such robots could be built with the techniques of molecular nanotechnology. Controllers with processing capabilities of 1000 MIPS per cubic micron, and electric motors with power densities of one milliwatt per cubic micron are assumed. Utility Fog should be capable of simulating most everyday materials, dynamically changing its form and proper ties, and forms a substrate for an integrated virtual reality and telerobotics. This paper will examine the concept, and explore some of the applications of this material.
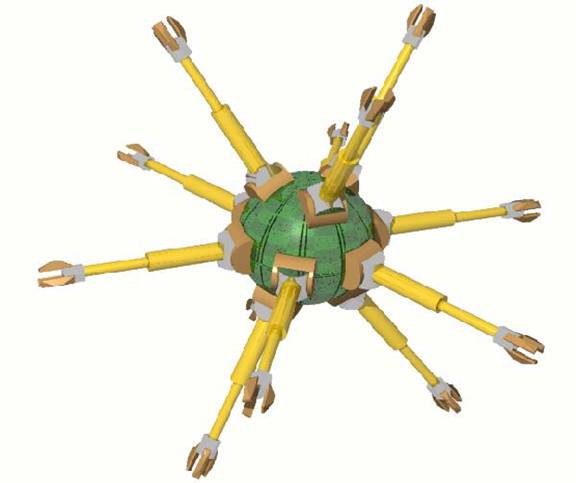
Imagine a microscopic robot. It has a body about the size of a human cell and 12 arms sticking out in all directions. A bucketful of such robots might form a "robot crystal" by linking their arms up into a lattice structure. Now take a room, with people, furniture, and other objects in it it's still mostly empty air. Fill the air completely full of robots. With the right programming, the robots can exert any force in any direction on the surface of any object. They can support the object, so that it apparently floats in the air. They can support a person, applying the same pressures to the seat of the pants that a chair would. They can exert the same resisting forces that elbows and fingertips would receive from the arms and back of the chair. A program running in the Utility Fog can thus simulate the physical existence of an object.
Although this class of nanotechnology has been envisioned by the technocracy since early times, and has been available to us for over twenty years, the name is more recent. A mundane scientist, J. Storrs Hall provided an important baseline examination of the issues involved in the application and design of Utility fog. He envisioned it as an active polymorphic material designed as a conglomeration of 100-micron robotic cells or foglets, built using molecular nanotechnology. An appropriate mass of Utility Fog could be programmed to simulate, to the same precision as measured by human senses, most of the physical properties, such as hardness, temperature, light, of any macroscopic object, including expected objects such as tables and fans, but also materials such as air and water. The major exceptions would be taste, smell, and transparency.
To users, it would seem like the Star Trek Holodeck except that it would use atoms instead of holographic illusions. It is an indication of the degree to which our science and technology have permeated society that a non member could so accurately describe and visualise the way in which "Utility Fog" operates.
The Nano-constructs operate in two modes - "native", and "fog". In "native" mode, individual foglets move into different positions and perform certain mechanical operations depending on what object it is forming. For example, if it forms part of a table, then it would be motionless and locked. If the object was a fan, then most of the structure would remain locked, and only the foglets between the two parts would need to move. With a suit made of Fog, you might wrestle alligators, cheating a little by having the suit amplify your movements as it protects you from the alligator's teeth.
In "fog" mode, the foglets do not move, but act more like pixels on a television screen - they "pixelate". The foglets vary other properties according to which part of the object they are representing, generally transmitting information and sound. A Fog-filled room would contain 90% air, and surround its occupant with a display screen with 100 micron resolution. Meanwhile, each litre of foglets behind the display would contain about a billion times the processing power of a 286 PC, making possible some pretty impressive virtual reality simulations.
The Utility Fog which is simulating air needs to be impalpable. One would like to be able to walk through a Fog-filled room without the feeling of having been cast into a block of solid Lucite. It is also desire-able to be able to breathe while using the Fog in this way! To this end, the robots representing empty space constantly run a fluid-flow simulation of what the air would be doing if the robots weren't there. Then each robot does what the air it displaces would do in its absence.
How can one breathe when the air is a solid mass of machines? Actually, it isn't really solid: the Foglets only occupy about 10% of the actual volume of the air (they need lots of "elbow room" to move around easily). There's plenty of air left to breathe. As far as physically breathing it, we set up a pressure-sensitive boundary, which translates air motions on one side to Fog motions on the other. It might even be possible to have the Fog continue the air simulation all the way into the lungs.
To understand why we want to fill the air with microscopic robots only to go to so much trouble to make it seem as if they weren't there, consider the advantages of a TV or computer screen over an ordinary picture. Objects on the screen can appear and disappear
at will; they are not constrained by the laws of physics. The whole scene can shift instantly from one apparent locale to another. Completely imaginary constructions, not possible to build in physical reality, could be commonplace. Virtually anything imaginable could be given tangible reality in a Utility Fog environment.
Why not, instead, build a virtual reality machine that produces a purely sensory version of the same apparent world? The Fog acts as a continuous bridge between actual physical reality and virtual reality. The Fog is universal effector as well as a universal sensor. Any (real) object in the Fog environment can be manipulated with an extremely wide array of patterns of pressure, force, and supported, measured, analyzed, weighed, cut, reassembled, or reduced to bacteria-sized pieces and sorted for recycling.
Utility Fog can act as a transparent interface between "cyberspace" and physical reality.
|
Most currently proposed nanotechnological designs are based on carbon. Carbon is a marvelous atom for structural purposes, forming a crystal (diamond) which is very stiff and strong. However, a Fog built of diamond would have a problem which nanomechanical designs of a more conventional form do not pose: the Fog has so much surface area exposed to the air that if it were largely diamond, especially on the surface, it would amount to a "fuel-air explosive".
Therefore the Foglet is designed so that its structural elements, forming the major component of its mass, are made of aluminum oxide, a refractory compound using common elements. The structural elements form an exoskeleton, which besides being a good mechanical design allows us to have an evacuated interior in which more sensitive nanomechanical components can operate. Of course, any macroscopic ignition source would vaporize the entire Foglet; but as long as more energy is used vaporizing the exoskeleton than is gained burning the carbon-based components inside, the reaction cannot spread.
Each Foglet has twelve arms, arranged as the faces of a dodecahedron. The arms telescope rather than having joints. The arms swivel on a universal joint at the base, and the gripper at the end cart rotate about the arm's axis. Each arm thus has four degrees of freedom, plus opening and closing the gripper. The only load-carrying motor on each axis is the extension/retraction motor. The swivel and rotate axes are weakly driven, able to position the arm in free air hut not drive any kind of load; however, there are load-holding brakes on these axes.
The gripper is a hexagonal structure with three fingers, mounted on alternating faces of the hexagon. Two Foglets "grasp hands" in an interleaved six-finger grip. Since the fingers are designed to match the end of the other arm, this provides a relatively rigid connection; forces are only transmitted axially through the grip.
When at rest, the Foglets form a regular lattice structure. If the bodies of the Foglets are thought of as atoms, it is a "face-centered cubic" crystal formation, where each atom touches 12 other atoms. Consider the arms of the Foglets as the girders of the trusswork of a bridge: they form the configuration known as the "octet truss" invented by Buckminster Fuller in 1956. The spaces bounded by the arms form alternate tetrahedrons and octahedrons, both of which are rigid shapes.
The Fog may he thought of as consisting of layers of Foglets. Tire layers, and the shear planes they define, lie at 4 major angles (corresponding to tire faces of the tetrahredrons and octahedrons) and 3 minor ones (corresponding to tire face-centered cube faces). In each of the 4 major orientations, each Foglet uses six arms to hold its neighbors in the layer; layers are thus a 2-dimensionally rigid fabric of equilateral triangles. In face-centered mode, the layers work out to he square grids, and are thins not rigid, a slight disadvantage. Most Fog motion is organized in
layers; layers slide by passing each other down hand-over-hand in bucket brigade fashion. At any instant, roughly half the arms will lie lurked between layers when they are in motion.
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |