


Published on Jan 09, 2026
Economically effective maintenance and monitoring of power systems to ensure high quality and reliability of electric power supplied to customers is becoming one of the most significant tasks of today's power industry. This is highly important because in case of unexpected failures, both the utilities as well as the consumers will have to face several losses.
The ideal power network can be approached through minimizing maintenance cost and maximizing the service life and reliability of existing power networks.
But both goals cannot be achieved simultaneously. Timely preventive maintenance can dramatically reduce system failures. Currently, there are three maintenance methods employed by utilities: corrective maintenance, scheduled maintenance and condition-based maintenance. The following block diagram shows the important features of the various maintenance methods.
Corrective maintenance dominates in today's power industry. This method is passive, i.e. no action is taken until a failure occurs. Scheduled maintenance on the other hand refers to periodic maintenance carried out at pre-determined time intervals. Condition-based maintenance is defined as planned maintenance based on continuous monitoring of equipment status. Condition-based maintenance is very attractive since the maintenance action is only taken when required by the power system components. The only drawback of condition-based maintenance is monitoring cost. Expensive monitoring devices and extra technicians are needed to implement condition-based maintenance. Mobile monitoring solves this problem.
Mobile monitoring involves the development of a robotic platform carrying a sensor array. This continuously patrols the power cable network, locates incipient failures and estimates the aging status of electrical insulation. Monitoring of electric power systems in real time for reliability, aging status and presence of incipient faults requires distributed and centralized processing of large amounts of data from distributed sensor networks. To solve this task, cohesive multidisciplinary efforts are needed from such fields as sensing, signal processing, control, communications and robotics.
As with any preventive maintenance technology, the efforts spent on the status monitoring are justified by the reduction in the fault occurrence and elimination of consequent losses due to disruption of electric power and damage to equipment. Moreover, it is a well recognized fact in surveillance and monitoring fields that measurement of parameters of a distributed system has higher accuracy when it is when it is accomplished using sensing techniques. In addition to sensitivity improvement and subsequent reliability enhancement, the use of robotic platforms for power system maintenance has many other advantages like replacing man workers for dangerous and highly specialized operations such as live line maintenance.
Generally speaking, the mobile monitoring of power systems involves the following issues:
The aging of power cables begins long before the cable actually fails. There are several external phenomena indicating ongoing aging problems including partial discharges, hot spots, mechanical cracks and changes of insulation dielectric properties. These phenomena can be used to locate the position of the deteriorating cables and estimate the remaining lifetime of these cables. If incipient failures can be detected, or the aging process can be predicted accurately, possible outages and following economical losses can be avoided.
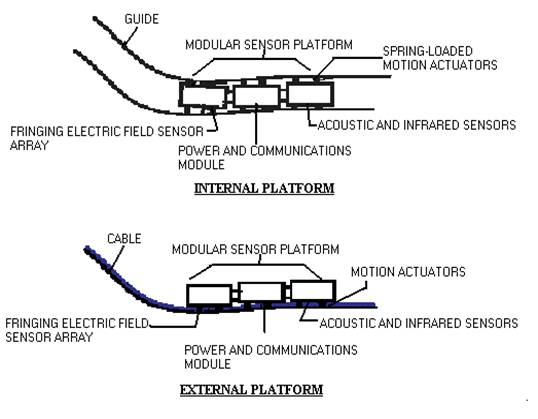
In the robotic platform, non-destructive miniature sensors capable of determining the status of power cable systems are developed and integrated into a monitoring system including a video sensor for visual inspection, an infrared thermal sensor for detection of hot spots, an acoustic sensor for identifying partial discharge activities and a fringing electric field sensor for determining aging status of electrical insulation. Among failure phenomena, the most important one is the partial discharge activity
Inspection robots used in power systems can be subdivided into external and internal ones. External robots travel over the outer surface of cables and may possess a high degree of autonomy, whereas internal robots travel in the inner spaces of ducts and pipes are often implemented as track-following devices with a predetermined
route and a limited set of operations. The selection of motion patterns is determined by their complexity and their autonomy level. The internal pattern requires an extra guide inside the cable. This causes a significant problem because it impairs the integrity of the cable. Another problem is that the size of the internal pattern is too small to carry many functions. Due to its simplicity and high autonomy level over internal pattern, the external traveling method is preferred.
Since the cable network is a global distributed system, it is very limiting for the inspection robot to draw a power cord behind itself. Ideally, the power supply has to be wireless. Therefore, it is desirable that the platform harvests energy from energized cables. Inductive coupling for wireless power supply could be a desired method. Although low frequency coupling is less efficient, direct proximity to the cable makes it a viable choice. Of course, the platform requires independent backup power source as well.
Control strategy includes object tracking, collision avoidance and prevention of electrical short circuits. The control system receives initial commands from the operator for the global tasks and small tasks are often pre-programmed. The control should be robust because of the complicated motions required and the irregular surface of the cable connections. It should include resources to locate the sensor array with respect to the inspected system, to determine the shortest path and to adaptively switch sensor operation from a fast superficial inspection mode to a slow detailed inspection mode.
The major purpose of signal processing is to determine the fault type, fault extent and aging status. Then the accurate estimation can be given to aid the decision on maintenance. The robot requires considerable computational resources to be adaptive and flexible. This is highly problematic because of the limited size of the robot, especially or underground applications. Generally speaking, the smaller is the size of the sensor or the actuator, the higher is its bandwidth. This implies higher control rates in the robot, which ultimately translates into additional computational load. Accordingly, this strongly argues for the use of communication and off-board intelligence. This also involves allocation between local and remote signal processing. In local signal processing, all data is processed onboard whereas in remote signal processing, all data is relayed to the host computer for analysis.
The communication module exchanges data between the master computer and the mobile robot, including data originating from different streams on both sides of communication link and different priorities associated with it.
The positioning system should work like a Global Positioning System (GPS), i.e., the exact position of the robot can be estimated by such a system. Once this system is implemented, effective maintenance and rescue tasks for cable systems, even for the robot itself, can be carried out. In most applications, two basic position estimation systems are employed, relative positioning and absolute positioning. Relative positioning can provide a rough estimate of location, while the absolute positioning can compensate the errors introduced.
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
