


Updated on May 29, 2026
In recent years, intelligent control has emerged as one of the most active and fruitful areas of research and development. Intelligent systems are usually described by analogies with biological systems by, for example, looking at how human beings perform control tasks, recognize patterns, or make decisions. Such area is a fusion of systems and control, computer science and operations research.
Intelligent control systems are typically able to perform one or more of the following functions: planning actions at different levels, learning from past experience, identifying changes against the system behavior, such as performance degradation, failures, cross-coupling and then reacting appropriately. The field of intelligent control has been applied to modern industrial systems, which are under dominance by diverse technical spheres of knowledge, specially containing mechanical, electrical, hydraulic, control system and drive train devices, where large models are required. To keep up the driving technology, engineers need to build systems orders of magnitude more complex than previous ones and deploy them faster. Therefore, intelligent control techniques are important for dealing with complex systems under such a new paradigm. This paper will focus on neural networks and fuzzy logic applications into the design of control systems.
The area of Intelligent Control is a fusion of a number of research areas in Systems and Control, Computer Science, and Operations Research among others, coming together, merging and expanding in new directions and opening new horizons to address the problems of this challenging and promising area. Intelligent control systems are typically able to perform one or more of the following functions to achieve autonomous behavior: planning actions at different levels of detail, emulation of human expert behavior, learning from past experiences, integrating sensor information, identifying changes that threaten the system behavior, such as failures, and reacting appropriately.
This identifies the areas of Planning and Expert Systems, Fuzzy Systems, Neural Networks, Machine Learning, Multi-sensor Integration, Failure Diagnosis, and Reconfigurable Control, to mention but a few, as existing research areas that are related and important to Intelligent Control.
While these techniques provide several key approaches to Intelligent Control, for complex systems they are often interconnected to operate within an architecture which is hierarchical and often distributed. It is for this reason that the areas of hierarchical intelligent control, distributed intelligent control, and architectures for intelligent systems are of significant importance in the design and construction of the overall intelligent controller for complex dynamical systems.
Finally, it is of fundamental importance to recognize that (i) intelligent controllers are nonlinear (possibly hierarchical and distributed) controllers that are constructed in non conventional ways, and (ii) intelligent controllers are often designed to operate in "critical environments" where, for example, the safety of a crew (e.g., in an aircraft/spacecraft), or environmental issues are of concern (e.g., from nuclear power plants or process control). Hence, it is both possible, and of significant importance to introduce mathematical modeling and analysis techniques to be used in the verification and certification of the behavior of intelligent control systems.
Beginning with an overview of intelligent control methodologies, the contributors present the fundamentals of neural networks, supervised and unsupervised learning, and recurrent networks. They address various implementation issues, then explore design and verification of neural networks for a variety of applications, including medicine, biology, digital signal processing, object recognition, computer networking, desalination technology, and oil refinery and chemical processes. The focus then shifts to fuzzy logic, with a review of the fundamental and theoretical aspects, discussion of implementation issues, and examples of applications, including control of autonomous underwater vehicles, navigation of space vehicles, image processing, robotics, and energy management systems.
Fuzzy systems and Neural Networks have been recognized as attractive alternatives to the classical control schemes for the low-cost and facilitated design of the control laws of partially known, nonlinear and complex processes. Neural networks and fuzzy systems are model free control design approaches that represent an advantage over classical control when dealing with complicated nonlinear actuator dynamics. Neuro-Fuzzy Control of Industrial Systems with Actuator Nonlinearities brings neural networks and fuzzy logic together with dynamical control systems. Each chapter presents powerful control approaches for the design of intelligent controllers to compensate for actuator nonlinearities such as time delay, friction, deadzone, and backlash that can be found in all industrial motion systems, plus a thorough development, rigorous stability proofs, and simulation examples for each design.
Rigorous stability proofs are further verified by computer simulations, and appendices contain the computer code needed to build intelligent controllers for real-time applications. Neural networks capture the parallel processing and learning capabilities of biological nervous systems, and fuzzy logic captures the decision-making capabilities of human linguistics and cognitive systems.
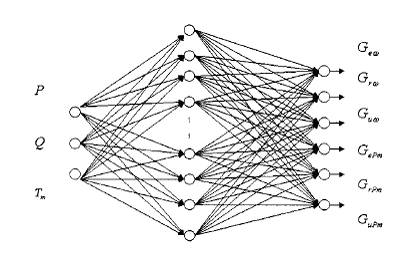
In order to tune the FCs, the Δw is scaled according to the following relation: and. The is scaled according to the relation, Δw=GrwΔw and Δw’, ΔWr’=GrwΔw’. The ΔP’m=GrpmΔPm In addition, the output of the first FC is scaled by Guw , and the output of the second FC is scaled by . In the aforementioned relations, Gew, Grw, Guw, GpPm, and GuPmare the scaling factors or gains. The gains of the FCs are tuned with a neural network, making the FCs adaptable to changes in operating conditions. The FCs are tuned by computing optimum gains, exploiting a neural net-work. The neural network is composed of three layers (Fig. 3). The active power, reactive power , and mechanical torque in asynchronous motor are selected for input signals to represent the operating condition of the system. For various sets of input data to the NN, the optimum values of gains are searched sequentially using simulations.
A data set has been generated by computer simulation by varying the active power load, reactive power load, and torque in an asynchronous motor. The evaluation of the optimization is checked by time domain performance specifications, such as peak time, percent overshoot, rise time, and settling time. The optimization was conducted by minimization of integrated time and squared error
A step load is applied at 0. By time weighting the error signal, less emphasis is placed on the initial error and greater emphasis on reducing long-duration oscillations. An optimization technique called the Levenberg–Marquardt method is used to train the neural network
A step load is applied at 0. By time weighting the error signal, less emphasis is placed on the initial error and greater emphasis on reducing long-duration oscillations. An optimization technique called the Levenberg–Marquardt method is used to train the neural network. This algorithm appears to be the fastest method for training moderate sized, feed forward neural networks (up to several hundred weights). This method is more powerful than gradient descent (back propagation training method), but requires more memory of the computer. Since the training process takes place offline, this requirement does not degrade the performance of the system
| Are you interested in this topic.Then mail to us immediately to get the full report.
email :- contactv2@gmail.com |
